



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Common Moudle
- >
- Sensors
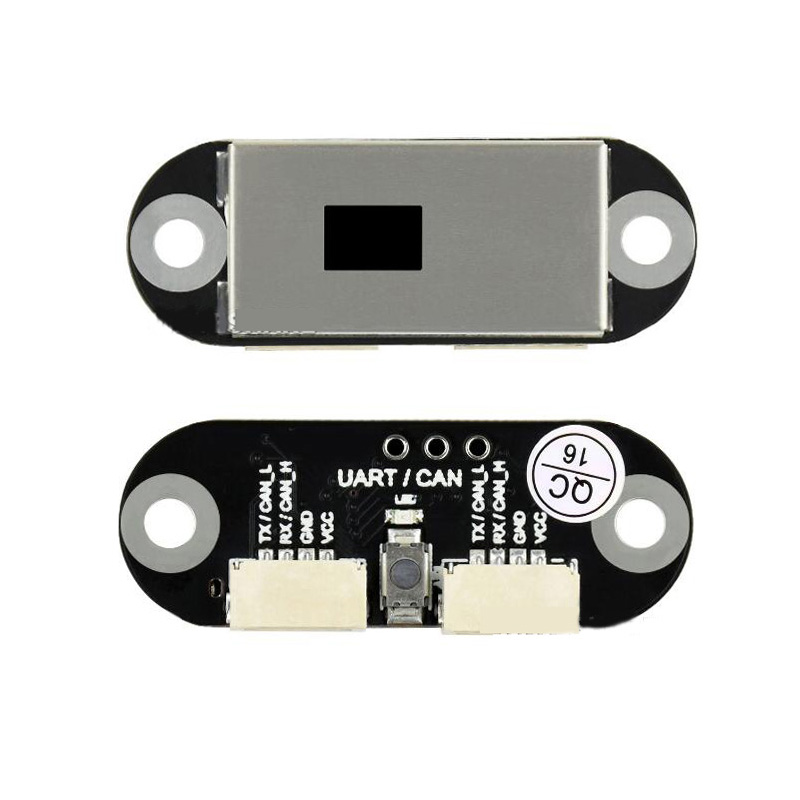
TOF Laser Range Sensor User Guide
Introduction
TOF Laser Range Sensor is one laser ranging sensor based on TOF (time of flight). The measuring scope is 1cm~5m, and the range resolution is 1mm; The data update frequency is 10Hz; Adjustable FOV with the maximum field angle is 27°; Supports UART and CAN communication; Support the active and query output data; Support the multi-sensor cascade ranging; Support I/O complementary output;
Feature
- Based on TOF (Time of Flight) laser ranging technology
- Support UART, CAN, I/O communication( UART, CAN, I/O shared interface)
- Measuring scope 1cm~5m
- Adjustable field angle (FOV), 15~27°
- Range resolution1mm
- Typical ranging precision ±1.5cm
- Active and query output
- Support multi-module cascade
- One-click upgrade firmware
- 3.7~5.2V powers supply with anti-reverse protection
- Power consumption is about 290mW
- 940nm laser in compliance with Class1 Standard stipulated in IEC 60825-1:2014Version 3
Specification
| Typical Ranging Scope (0.01~5.00m) | Short distance:0.012~2.16m |
|---|---|
| Medium distance:0.012~3.60m | |
| Long distance: 0.01~5.00m | |
| Typical Ranging Precision | Short distance: Precision±1.0cm, Standard deviation<0.3cm |
| Medium distance: Precision±1.0cm, Standard deviation<1.5cm | |
| Long distance: Precision±1.5cm,Standard deviation<0.5cm@[0.01,3]m scope, Standard deviation<8cm@(3,5]m scope | |
| Measurement resolution | 1mm |
| Wave Length | 940nm (Comply with Class 1 Standard in IEC 60825-1:2014 Version 3) |
| Field Angle (FOV) | 15°~27° (Multiple gears adjustable) |
| Communication Interface (UART/CAN) | UART (Two interfaces can be simultaneously as UART interface, electrical level of TTL signal line is 3.3V) |
| CAN (Two interfaces can be simultaneously as CAN interface) | |
| Communication baud rate | UART:115200~3000000bps (Default 115200bps) |
| CAN:100000~3000000bps (Default 100000bps) | |
| Cascade Quantity | UART interface supports cascading up to 8 , CAN interface supports cascading up to 7 |
| Voltage of Power Supply | 3.7~5.2V |
| Power Consumption | Under UART active output and long distance measuring mode, voltage of power supply is Copyright © Nooploop Ltd. 2019. All Rights Reserved. 7 5.0V and current is 58mA. |
| Product Weight | 2.7g |
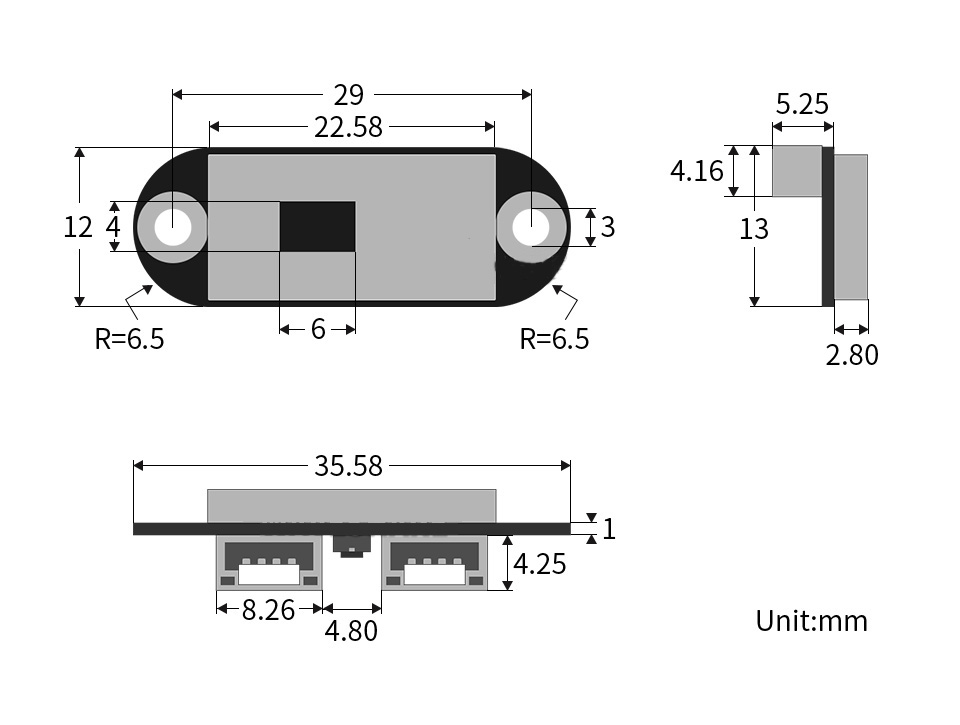
| Dimension | 35.58 × 12 × 8.05mm (Length*Width*Height) |
Applications
- Unmanned aerial vehicle height setting,ceiling detection
- Robot obstacle avoidance
- Measuring and detecting
- Intelligent gesture control
- 1-dimension gesture identification
Technology Overview
TOF is one absolute distance detecting technology, that is the sensor emits the near-infrared light to be debugged, and it will reflect after encountering the object. The sensor calculates the distance of subject being photographed through calculating the time difference or phase difference for the emission and reflection of light so as to produce the depth information. Compared with the binocular plan and 3D structural light plan, TOF has the advantages of long working distance, wide application scenarios and high precision of long distance etc. Therefore, it is always applied to the personnel proximity detection, robot obstacle avoidance, camera automatic focusing etc. The near-infrared light coming from the sun light in the out-door environment will generate the impact to the measuring effect of module.
Function description
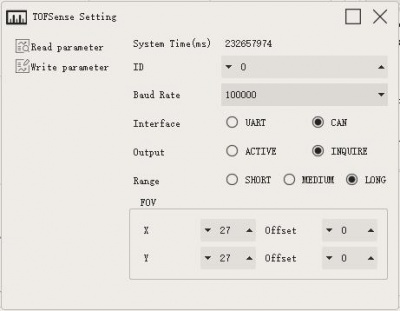
【ID】
- ID is one variable set up for distinguishing the different sensors, which is used to identify each sensor during the cascade connection.
【Interface & Baudrate】
TOFSense supports two communication modes with configurations are UART and CAN.
- UARTThe communication baud rate setting range is as follows:
| UART Baud Rate | Note |
|---|---|
| 115200,230400,460800,921600,1000000,1200000,2000000,3000000 | Baud Rate is 115200 in default |
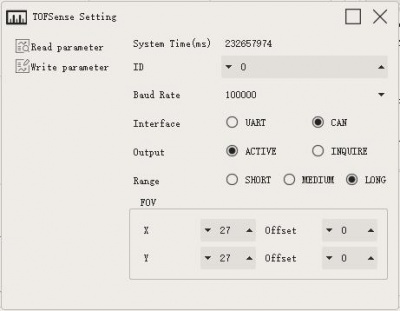
- Under CAN output mode, the setting range of Baud rate shall be shown as:
| CAN Baud Rate | Note |
|---|---|
| 100000,250000,500000,1000000,2000000,3000000 | Baud Rate is 1000000 in default |
Interface data output mode setting:
- Active Output:
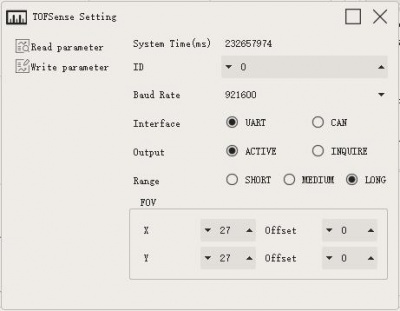
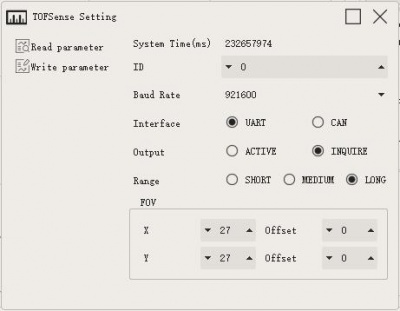
- Query Output:
- The query output mode can be used in single module and cascade connection. In this mode, the controller sends a query command containing the module ID to the desired query module, and the module can output one frame of measurement information.
- Query output mode configuration as shown below:
【Distance Status】
The module can output the current distance status, the user can perform the data processing with the combination of distance status,The meaning of distance status is as follows:
| Value | Note |
|---|---|
| 0 | Measuring distance is valid |
| 1 | Standard deviation is more than 15mm |
| 2 | Signal strength is lower than 1Mcps |
| 4 | Phase exceeds boundary |
| 5 | HW or VCSEL has fault |
| 7 | Phase is not matched |
| 8 | Internal algorithm underflow |
| 14 | Measuring distance is invalid |
【Signal Strength】
Indicate the strength of current return signal, and the larger this value indicates the stronger the return signal.
【FOV】
- The field angle FOV determines the vision scope of TOFSense. The module can change the field angle at X direction fov.x, field angle at Y direction fov.y, offset at X direction fov.x_offset and offset at Y direction fov.y_offset. The setting scope for field angle at X, Y directions is 15°~27°. The setting scope of offset for field angle at X, Y directions is -6°~ 6°.
- Module initial field of view parameters:fov.x=27°、fov.y=27°、fov.x_offset=0°、fov.y_offset=0°.
By setting the X-direction field of view angle of 25°, Y-direction field of view angle of 15°, X-direction offset 1°, Y-direction offset -1°.
The area of interest of the module can be changed as shown in the figure below: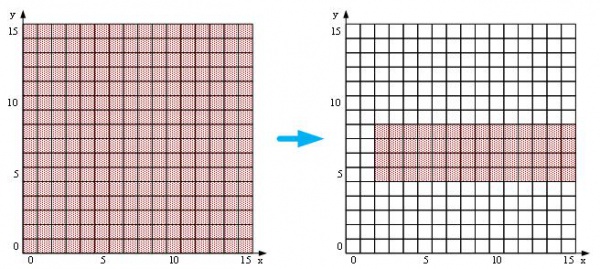
Note: A smaller FOV can improve the detection performance of the module in a small space and small objects, but the change of the FOV field of view will also affect the module’s farthest ranging distance.The smaller the field of view, the smaller the farthest ranging distance.
【Indicator Light】
- The indicator includes two flashing status in total, including the fast flash once per 0.1S and slow flash once per 1S. LED status and meaning are as follows:
| Status | Note |
|---|---|
| Fast Flash (interval 0.1S) | Module starting stage |
| Fast Flash (interval 0.1S) | Module firmware update |
| Slow Flash (interval 1S) | Module normal working |
【Function Key】
- It is used for the parameter setup under CAN communication mode. Press the power-on key until the indicator has the slow flash, and then compulsively enters UART configuration mode. This operation will not change the module setting parameter. If changing the module setup, it is required to rewrite the parameter.
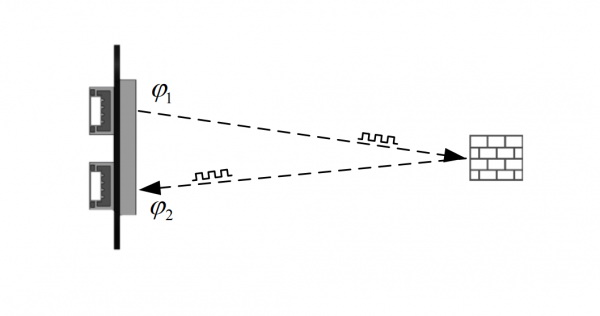
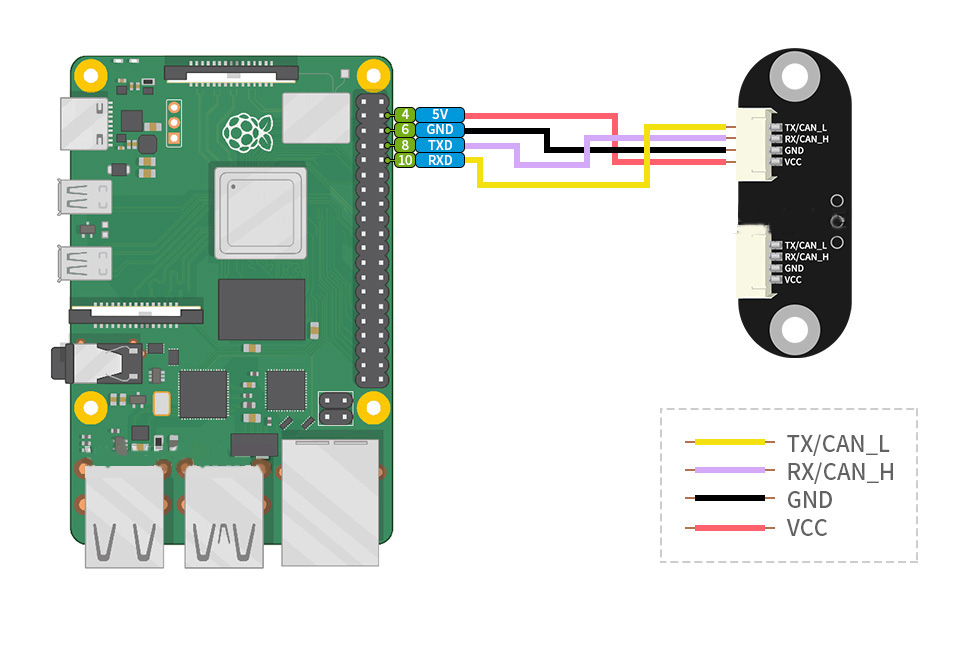
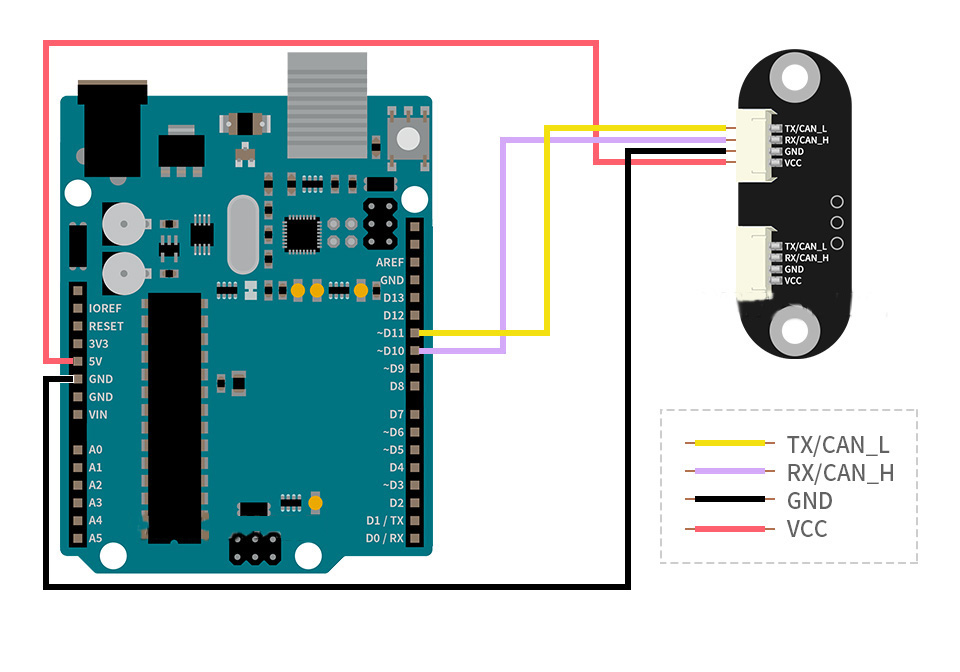
【CascadeRanging】
- Multiple sensors are configured with different IDs and connected in series, and the ranging information of all sensors can be read through one communication interface. The connection diagram is as follows:

Note: Under cascade ranging, it is suitable for UART query, CAN query, and CAN active output.。
Protocol analysis
- The protocol is composed of Frame Header, Function Mark, Data, and Sum Check.
- The Frame Header and Function Mark are fixed values;
- Data is the content of the transmitted data;
- Sum Check is the lowest byte after the addition of Frame Header, Function Mark, and Data (that is, the addition of all the previous bytes).
- Agreement composition:
Frame Header + Function Mark + Data + Sum Check
Note: Protocol packets follow the principle of little-endian mode, that is, the low byte is first and the high byte is last.
- TOFSense _UART_Frame:
- Data Sources: Connect the module to the host computer and configure the UART as active output mode.
- Raw data:
57 00 ff 00 9e 8f 00 00 ad 08 00 00 03 00 ff 3a
- Analysis table:
- Analysis table:
| Data | Type | Length (Bytes) | Hex | Result |
|---|---|---|---|---|
| Frame Header | uint8 | 1 | 57 | 0x57 |
| Function Mark | uint8 | 1 | 00 | 0x00 |
| reserved | uint8 | 1 | ff | * |
| id | uint8 | 1 | 00 | 0 |
| System_time | uint32 | 4 | 9e 8f 00 00 | 36766ms |
| dis*1000 | uint24 | 3 | ad 08 00 | 2.221m |
| dis_status | uint8 | 1 | 00 | 0 |
| signal_strength | uint16 | 2 | 03 00 | 3 |
| reserved | * | 1 | ... | * |
| Sum Check | uint8 | 1 | 3a | 0x3a |
- TOFSense _UART_Read_Frame:
- Data Sources: Connect the module to the host computer, configure it as UART query output mode, id is 0, send the following data through the host computer to achieve data query.
- Raw data:
57 10 FF FF 00 FF FF 63
- Analysis table:
- Analysis table:
| Data | Type | Length (Bytes) | Hex | Result |
|---|---|---|---|---|
| Frame Header | uint8 | 1 | 57 | 0x57 |
| Function Mark | uint8 | 1 | 00 | 0x00 |
| reserved | uint8 | 2 | ff | * |
| id | uint8 | 1 | 00 | 0 |
| reserved | uint8 | 2 | ff | * |
| Sum Check | uint8 | 1 | 3a | 0x3a |
- TOFSense _CAN_Frame:
- Data Sources: The module is configured as CAN active output mode, id is 1, connect to CAN receiving device.
- Raw data:
AD 08 00 00 03 00 FF FF
- Analysis table:
- Analysis table:
| Field name | Part | Level | Type | Length(bits) | Hex | Result |
|---|---|---|---|---|---|---|
| Start Of Frame | SOF | * | 1 | * | * | |
| Arbitration Field | ID | * | 11 | 0x200+id | 0x201 | |
| Arbitration Field | RTR | * | 1 | * | * | |
| Control Field | IDE | * | 1 | * | * | |
| Control Field | r0 | * | 1 | * | * | |
| Control Field | DLC | * | 4 | * | * | |
| Data Field | dis*1000 | uint24 | 24 | ad 08 00 | 2.221m | |
| Data Field | dis_status | uint8 | 8 | 00 | 0 | |
| Data Field | signal_strength | uint16 | 16 | 03 00 | 3 | |
| Data Field | reserved | * | 16 | * | * | |
| CRC Field | CRC | * | 15 | * | * | |
| CRC Field | CRC_delimiter | * | 1 | * | * | |
| ACK Field | ACK Slot | * | 1 | * | * | |
| ACK Field | ACK_delimiter | * | 1 | * | * | |
| End Of Frame | EOF | * | 7 | * | * |
- TOFSense _CAN_Read_Frame:
- Data source: The module is configured in CAN query output mode, id is 1, connected to CAN query device, and id_s is configured as 2。
- Date Sources:
FF FF FF 01 FF FF FF FF
- Analysis table:
- Analysis table:
| Field name | Part | Level | Type | Length(bits) | Hex | Result |
|---|---|---|---|---|---|---|
| Start Of Frame | SOF | * | 1 | * | * | |
| Arbitration Field | ID | * | 11 | 0x400+id_s | 0x402 | |
| Arbitration Field | RTR | * | 1 | * | * | |
| Control Field | IDE | * | 1 | * | * | |
| Control Field | r0 | * | 1 | * | * | |
| Control Field | DLC | * | 4 | * | * | |
| Data Field | reserved | uint24 | * | * | * | |
| Data Field | id | uint8 | 8 | 01 | id = 1 | |
| Data Field | reserved | uint16 | * | * | * | |
| CRC Field | CRC | * | 15 | * | * | |
| CRC Field | CRC_delimiter | * | 1 | * | * | |
| ACK Field | ACK Slot | * | 1 | * | * | |
| ACK Field | ACK_delimiter | * | 1 | * | * | |
| End Of Frame | EOF | * | 7 | * | * |
Software
NAssistant is the accessory debug software for TOFSense with the main functions are: Debug configuration, Status display, Function application, Firmware upgrade:
- Debug configuration: Used for configuring the relevant parameters of nodes, e.g. ID, working
mode, Baud rate etc.
- Function application: Used for the application development, e.g. data import and export, motion
trail storage, historical trial replay etc.
- Firmware upgrade: Used for carrying out the wired firmware upgrade for product.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}