



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Common Moudle
- >
- ESP
ESP32-S3-Touch-AMOLED-1.43 User Guide
Usage Instructions
ESP32-S3-Touch-AMOLED-1.43 currently provides two development tools and frameworks, Arduino IDE and ESP-IDF, providing flexible development options, you can choose the right development tool according to your project needs and personal habits.
Development Tools
| Arduino IDEArduino IDE is an open source electronic prototyping platform, convenient and flexible, easy to get started. After a simple learning, you can start to develop quickly. At the same time, Arduino has a large global user community, providing an abundance of open source code, project examples and tutorials, as well as rich library resources, encapsulating complex functions, allowing developers to quickly implement various functions. |
| ESP-IDFESP-IDF, or full name Espressif IDE, is a professional development framework introduced by Espressif Technology for the ESP series chips. It is developed using the C language, including a compiler, debugger, and flashing tool, etc., and can be developed via the command lines or through an integrated development environment (such as Visual Studio Code with the Espressif IDF plugin). The plugin offers features such as code navigation, project management, and debugging, etc.. |


Each of these two development approaches has its own advantages, and developers can choose according to their needs and skill levels. Arduino are suitable for beginners and non-professionals because they are easy to learn and quick to get started. ESP-IDF is a better choice for developers with a professional background or high performance requirements, as it provides more advanced development tools and greater control capabilities for the development of complex projects.
Components Preparation
- ESP32-S3-Touch-AMOLED-1.43 x1
- TF card (capacity less than 64G) x1
- USB cable (Type-A to Type-C) x 1

Working with Arduino
This chapter introduces setting up the Arduino environment, including the Arduino IDE, management of ESP32 boards, installation of related libraries, program compilation and downloading, as well as testing demos. It aims to help users master the development board and facilitate secondary development.

Environment Setup
Download and Install Arduino IDE
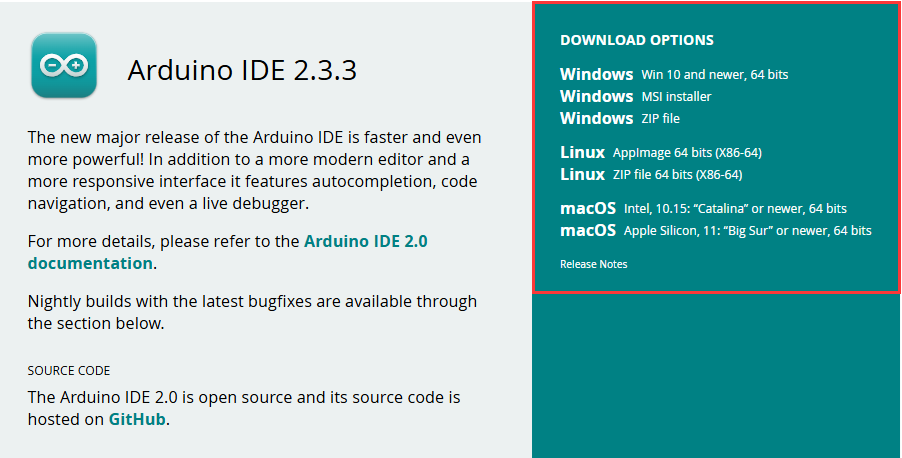
- Click to visit the Arduino official website, select the corresponding system and system bit to download
- Run the installer and install all by default
Install ESP32 Development Board
- Before using ESP32-related motherboards with the Arduino IDE, you must first install the software package for the esp32 by Espressif Systems development board
- According to Board installation requirement, it is generally recommended to use Install Online. If online installation fails, use Install Offline.
- For the installation tutorial, please refer to Arduino board manager tutorial
| Board name | Board installation requirement | Version number requirement |
|---|---|---|
| esp32 by Espressif Systems | "Install Offline" / "Install Online" | ≥3.1.0 |
Install Library
- When installing Arduino libraries, there are usually two ways to choose from: Install online and Install offline. If the library installation requires offline installation, you must use the provided library file
For most libraries, users can easily search and install them through the online library manager of the Arduino software. However, some open-source libraries or custom libraries are not synchronized to the Arduino Library Manager, so they cannot be acquired through online searches. In this case, users can only manually install these libraries offline. - For library installation tutorial, please refer to Arduino library manager tutorial
- ESP32-S3-Touch-AMOLED-1.43 library file path:
..\ESP32-S3-Touch-AMOLED-1.43-Demo\Arduino\libraries
| Library Name | Description | Version | Library Installation Requirement |
|---|---|---|---|
| LVGL | Graphical library | v8.4.0 | "Install Offline" |
Run the First Arduino Demo
New Project
- Run the Arduino IDE and select
File->New Sketch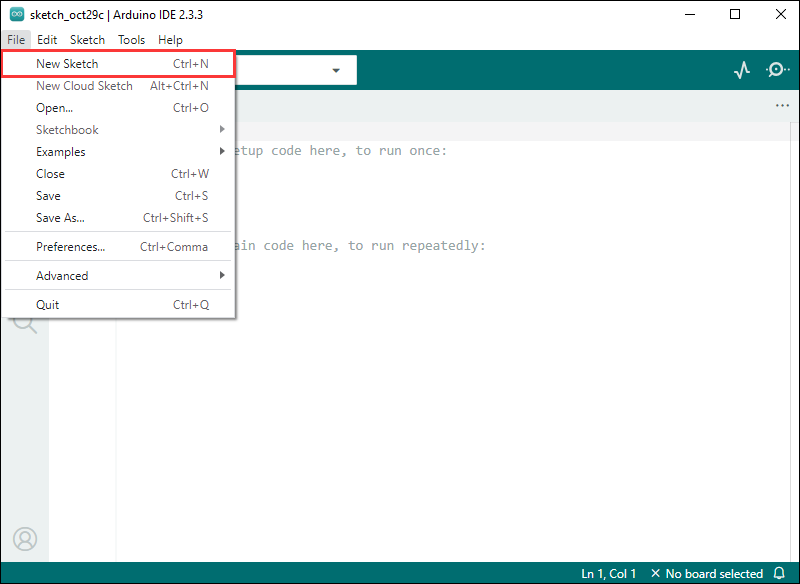
- Enter the code:
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println("Hello, World!");
delay(2000);
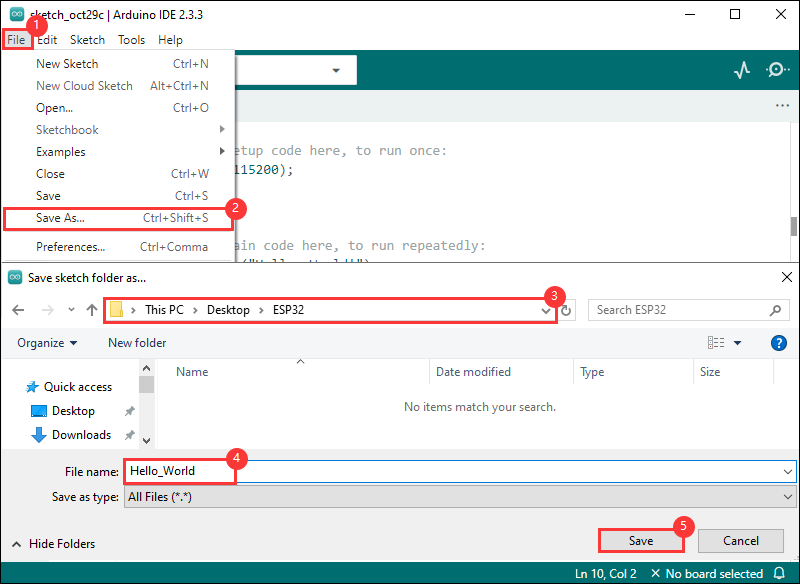
}- Save the project and select
File->Save As.... In the pop-up menu, select the path to save the project, and enter a project name, such as Hello_World, clickSave
Compile and Flash Demos
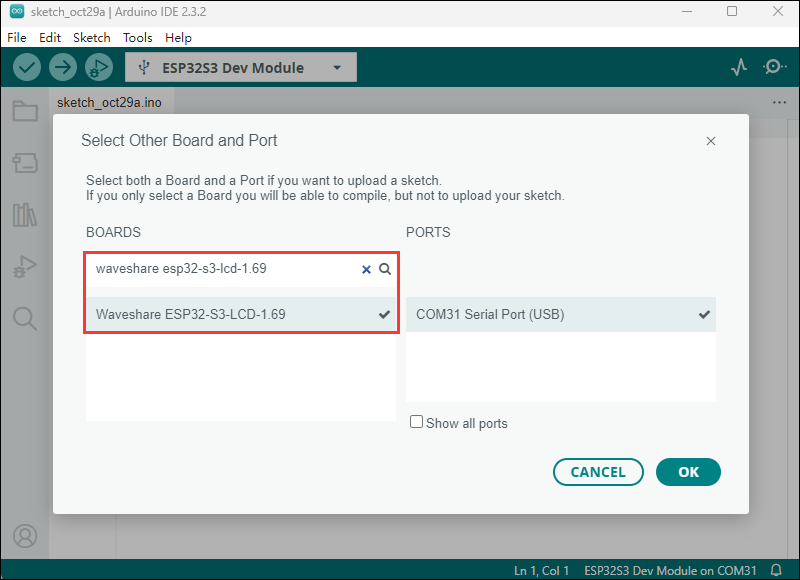
- Select the corresponding development board, take the ESP32S3 motherboard as an example:
①. Click to select the dropdown menu option Select Other Board and Port;
②. Search for the required development board model esp32s3 dev module and select;
③. Select COM Port;
④. Save the selection.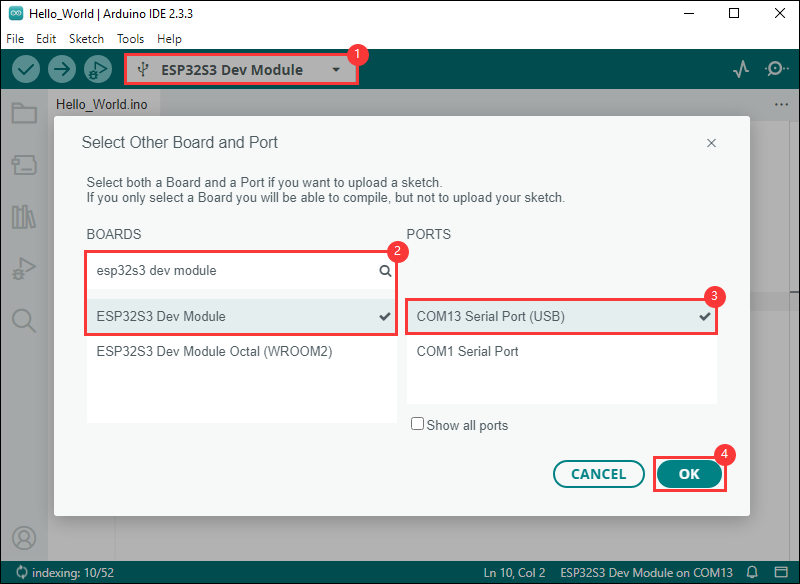
- Some development boards with specified version numbers support direct model selection, for example, "Waveshare ESP32-S3-LCD-1.69":
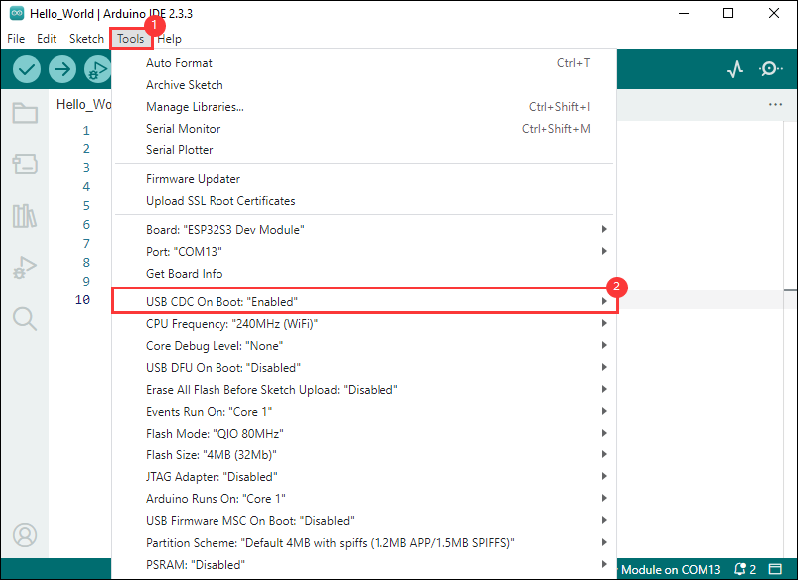
- If the ESP32S3 mainboard only has a USB port, you need to enable USB CDC, as shown in the following diagram:
- Compile and upload the program:
①. Compile the program; ②. Compile and download the program; ③. Download successful.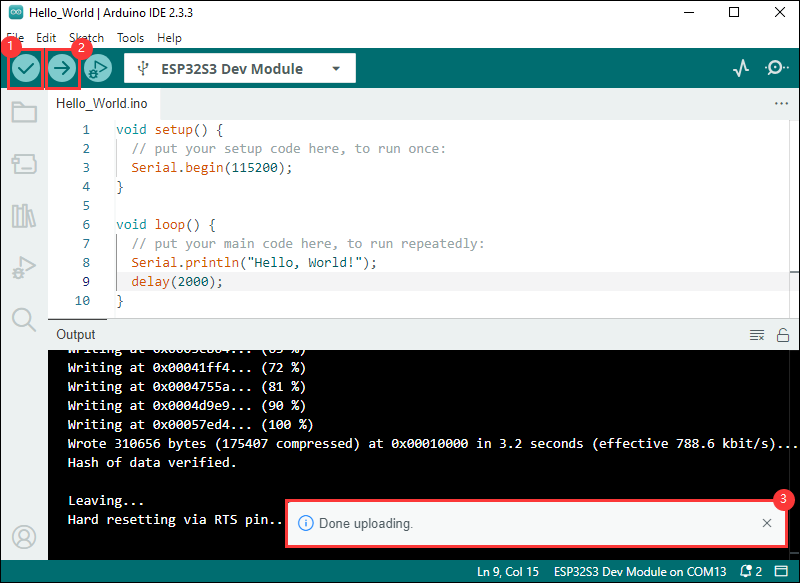
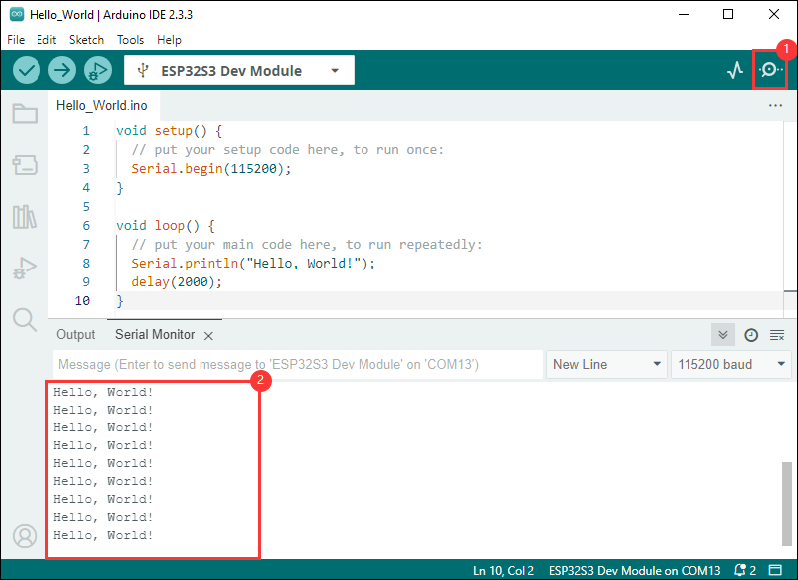
- Open the Serial Monitor window, and the demo will print "Hello World!" every 2 seconds, and the operation is as follows:
Demo

| Demo | Basic Description | Dependency Library |
|---|---|---|
| 01_ADC_Test | Read the current voltage value of the system | - |
| 02_I2C_PCF85063 | Print the real-time time of RTC chip | - |
| 03_I2C_QMI8658 | Print the original data sent by the IMU | - |
| 04_SD_Card | Load and display the information of the TF card | - |
| 05_WIFI_AP | Set to AP mode to obtain the IP address of the access device | - |
| 06_WIFI_STA | Set to STA mode to connect to WiFi and obtain an IP address | - |
| 07_LVGL_Test | LVGL demo | LVGL |
Arduino Project Parameter Setting
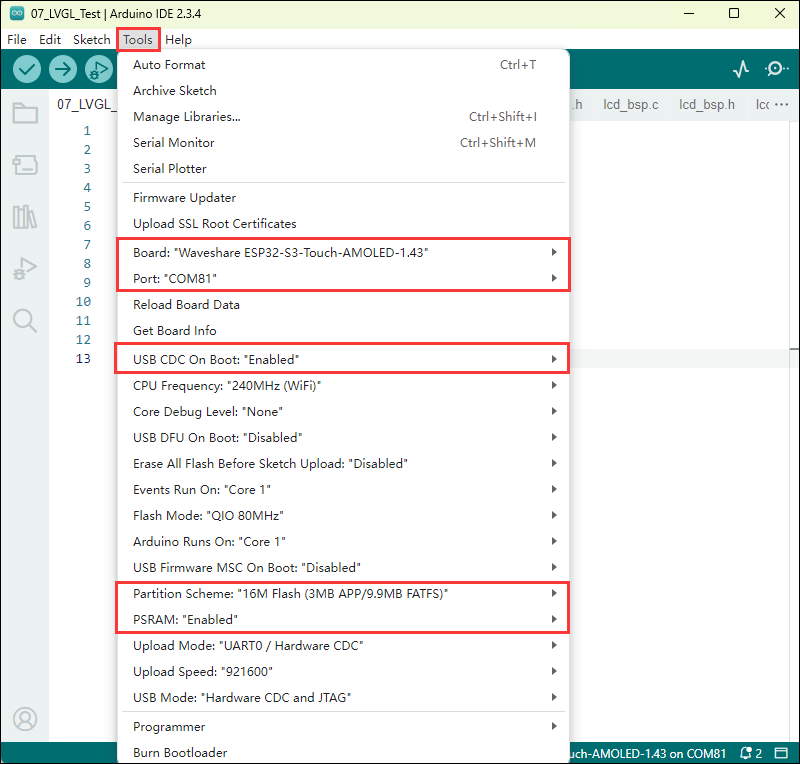
01_ADC_Test
Demo description
- The analog voltage connected through the GPIO is converted to digital by the ADC, and then the actual system voltage is calculated and printed to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- adc_bsp_init(void) : Initializes ADC1, including creating an ADC one-time trigger unit and configuring channel 3 for ADC1
- adc_get_value(float *value,int *data) : Reads the value of ADC1 channel 3 and calculates the corresponding voltage value based on the reference voltage and resolution, stores it at the position where the incoming pointer points to, and stores 0 if the read fails
- adc_example(void* parameter): Initialize ADC1 and then create an ADC task that reads the ADC value every 1 second and calculates the system's voltage based on the raw ADC value
Result demonstration
- The program compilation download is complete, and opening the serial port monitor will show the printed ADC values and voltage, as shown in the following figure:
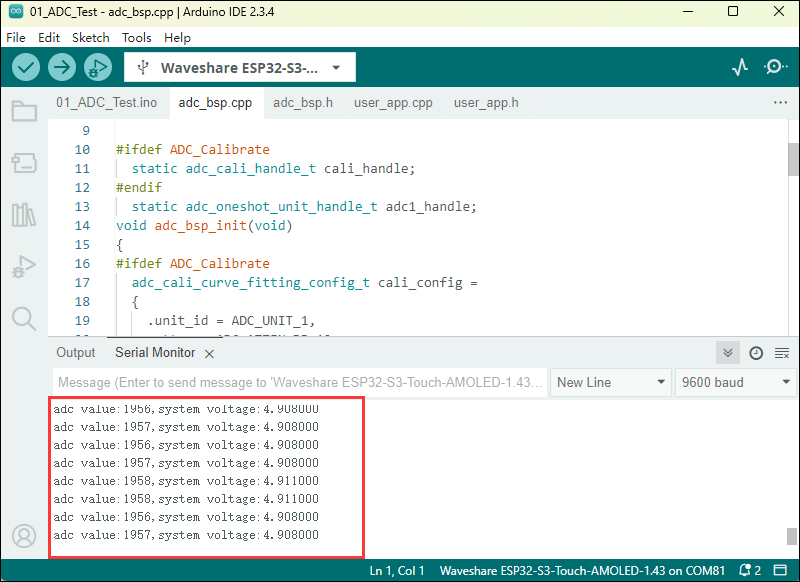
- The ADC sampling value is about 1900, and the system voltage is about 4.9V. For a detailed analysis, you can refer to the schematic diagram
02_I2C_PCF85063
Demo description
- Through the I2C protocol, initialize the PCF85063 chip, set the time, and then periodically read the time and print it to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- void PCF85063_example(void* parameter) : Create an RTC task to implement RTC functionality, reading the clock from the RTC chip every 10 seconds and then outputting it to the terminal
Result demonstration
- Open the serial port monitoring, you can see the RTC time of the printout, as shown in the figure below:
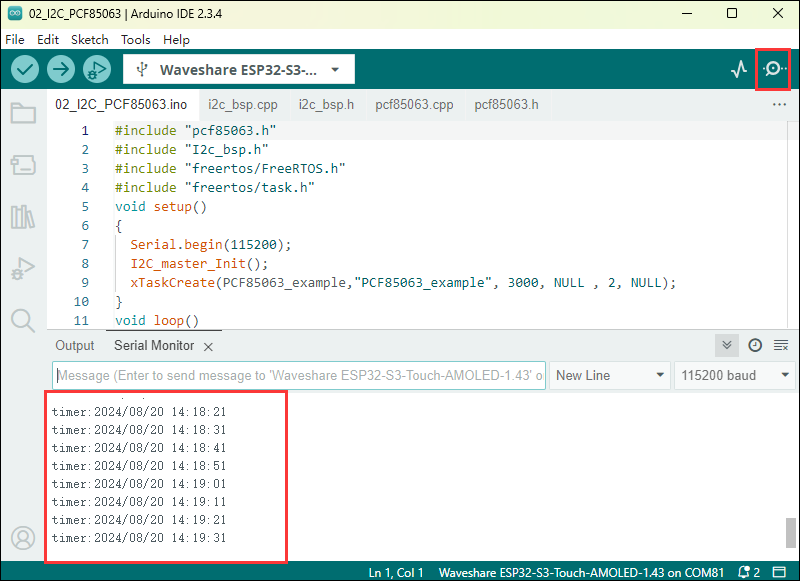
- Data is output every 10 seconds. If you need to modify or refer to it, you can directly access the PCF85063 source file for operations.
03_I2C_QMI8658
Demo description
- Through I2C protocol, initialize the QMI8658 chip, then read and print the corresponding attitude information every 1 second to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- qmi8658c_example(void* parameter): The function initializes the QMI8658 device, reading and printing accelerometer data, gyroscope data, and temperature data in an infinite loop, once every second. During the rotation of the board, the gyroscope data increases with greater rotation speed, and the accelerometer calculates the corresponding acceleration based on the current position.
Result demonstration
- Open the serial port monitoring, and you can see the original data output from the IMU (Euler angles need to be converted by yourself), as shown in the following figure:
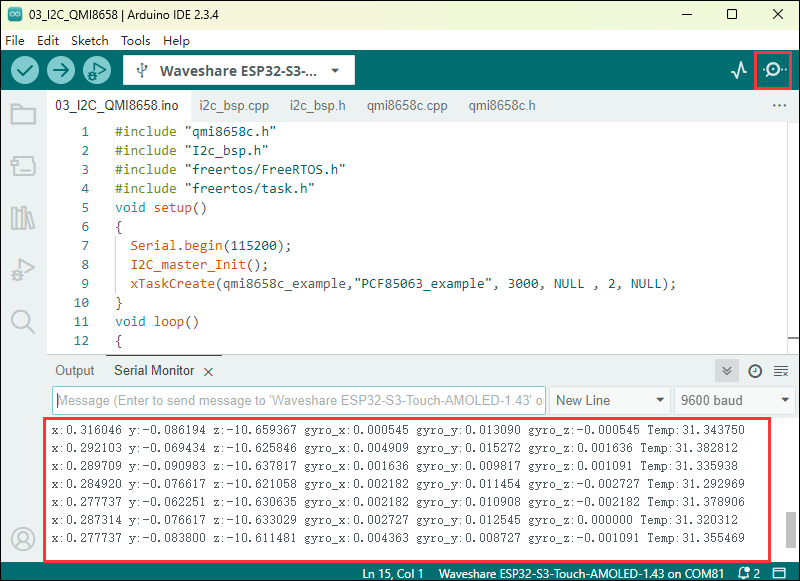
- Data is output once every second. If you need to modify or refer to it, you can directly access the qmi source file for operations
04_SD_Card
Demo description
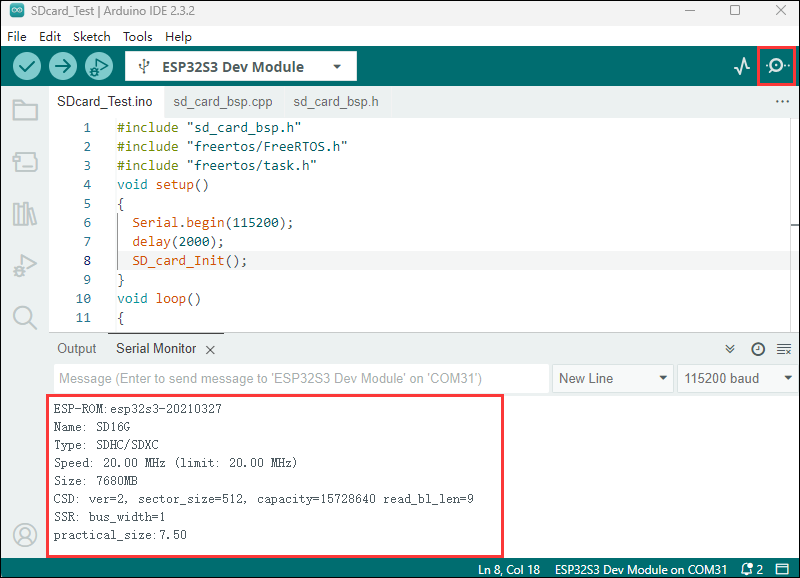
- Select SPI or SDMMC direction to drive the TF card through macro definition, and print the TF card information to the terminal after successfully mounting the TF card
Hardware connection
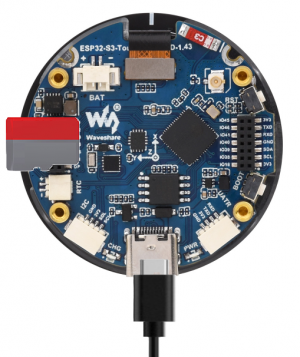
- Install a TF card on the board (you must insert a TF card with a capacity of less than 64G first), and use a USB cable to connect the board to the computer
Code analysis
- The communication protocol of the TF card can be implemented according to the user's choice, find the macro definition
SD_Read_Modeunder the source filesd_card_bsp.cpp, the macro definition uses the SDMMC communication protocol by default, which can be modified to SDSPI
#define SD_Read_Mode USER_SPI
Result demonstration
- Click on the serial port monitoring device, you can see the information of the output TF card, practical_size is the actual capacity of the TF card, as shown in the figure below:
05_WIFI_AP
Demo description
- Use the development board as an AP waiting for STA terminal connection
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
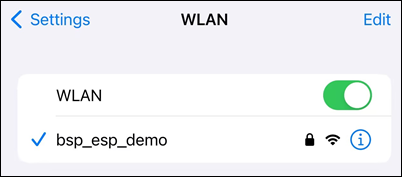
- The code initializes serial communication on the ESP32 and then creates a WiFi access point named "bsp_esp_demo" with the password "waveshare", and no other continuous operations are performed in a loop while the program runs.
const char* ssid = "bsp_esp_demo"; const char* password = "waveshare"; WiFi.softAP(ssid,password);
Result demonstration
- Use your mobile phone or other device to connect to WIFI, the WiFi name is "bsp_esp_demo", and the password is "waveshare"
06_WIFI_STA
Demo description
- The development board is used as a terminal role, which can connect to the AP available in the environment, and print the obtained IP information to the terminal after successful connection
Hardware connection
- Connect the board to the computer using a USB cable
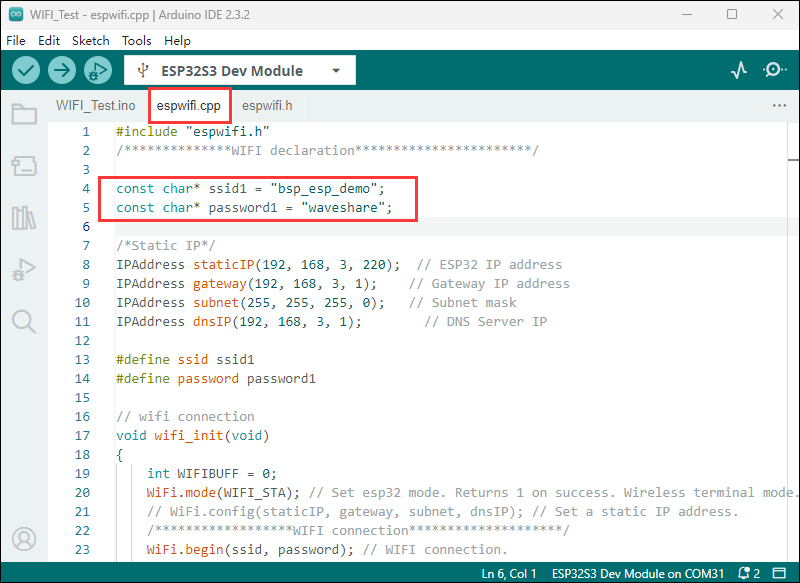
Code modification
This project implements the chip connecting to WIFI and obtaining an IP address while in STA mode. Before compiling and downloading the firmware, some code needs to be modified to the name and password of the available WIFI router in the current environment
Code analysis
- wifi_init(void): This function is used to initialize the Wi-Fi connection of the ESP32. It sets the ESP32 to Wi-Fi site mode and tries to connect to the specified Wi-Fi network (via the
ssidandpassword). If the connection is successful, it prints the local IP address; if the connection fails within a certain period (20 * 500 milliseconds), it prints the connection failure message. At the same time, the function can also set the auto-connection and auto-reconnect functions
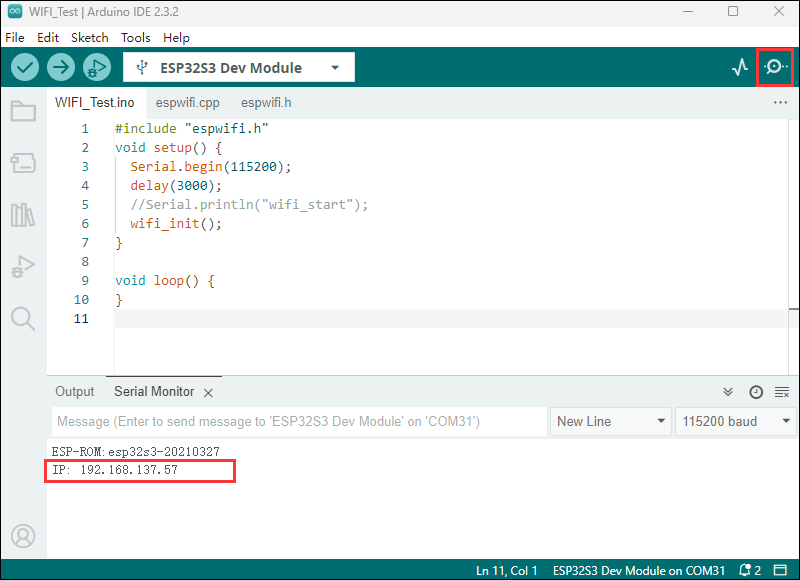
Result demonstration
- The chip is successfully connected to WIFI in STA mode, and you can see the obtained IP address by clicking on the serial port monitoring device
07_LVGL_Test
Demo description
- Implement some multifunctional GUI interfaces on the screen by porting LVGL
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
For LVGL, lvgl_conf.h is its configuration file. Below, some commonly used settings are explained, and some LVGL demos and file systems can also be configured in the conf file
/*Color depth: 1 (1 byte per pixel), 8 (RGB332), 16 (RGB565), 32 (ARGB8888)*/
#define LV_COLOR_DEPTH 16//Color depth, a macro definition that must be concerned with porting LVGL
#define LV_MEM_CUSTOM 0
#if LV_MEM_CUSTOM == 0
/*Size of the memory available for `lv_mem_alloc()` in bytes (>= 2kB)*/
#define LV_MEM_SIZE (48U * 1024U) /*[bytes]*/
/*Set an address for the memory pool instead of allocating it as a normal array. Can be in external SRAM too.*/
#define LV_MEM_ADR 0 /*0: unused*/
/*Instead of an address give a memory allocator that will be called to get a memory pool for LVGL. E.g. my_malloc*/
#if LV_MEM_ADR == 0
#undef LV_MEM_POOL_INCLUDE
#undef LV_MEM_POOL_ALLOC
#endif
#else /*LV_MEM_CUSTOM*/
#define LV_MEM_CUSTOM_INCLUDE <stdlib.h> /*Header for the dynamic memory function*/
#define LV_MEM_CUSTOM_ALLOC malloc
#define LV_MEM_CUSTOM_FREE free
#define LV_MEM_CUSTOM_REALLOC realloc
#endif /*LV_MEM_CUSTOM*/
//The above section is mainly for LVGL memory allocation,
//which defaults to lv_mem_alloc() versus lv_mem_free().Code modification
- The display chip itself does not support hardware rotation. If rotation is needed, it can be achieved through software. You can find the macro definition
#define EXAMPLE_Rotate_90in lcd_bsp.c file and uncomment this macro definition. Software rotation performance is not as good as hardware rotation
#define EXAMPLE_Rotate_90
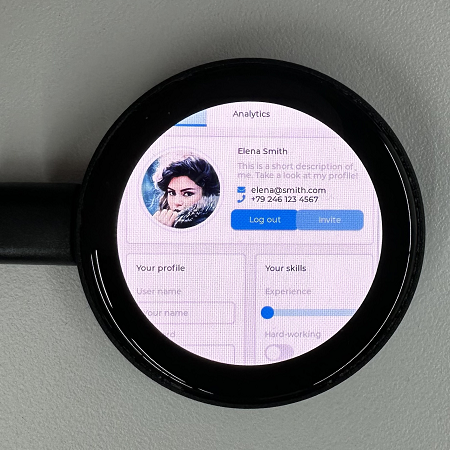
Result demonstration
- The LVGL demo has high requirements for RAM and ROM, so it is necessary to configure the demo according to the requirements of environment setup, and after the program is flashed, the running effect of the device is as follows:
Working with ESP-IDF
This chapter introduces setting up the ESP-IDF environment setup, including the installation of Visual Studio and the Espressif IDF plugin, program compilation, downloading, and testing of demos, to assist users in mastering the development board and facilitating secondary development.

Environment Setup
Download and Install Visual Studio
- Open the download page of VScode official website, choose the corresponding system and system bit to download
- After running the installation package, the rest can be installed by default, but here for the subsequent experience, it is recommended to check boxes 1, 2, and 3
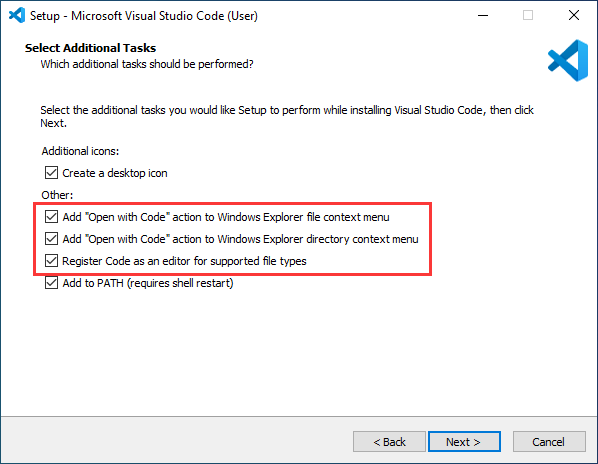
- After the first two items are enabled, you can open VSCode directly by right-clicking files or directories, which can improve the subsequent user experience.
- After the third item is enabled, you can select VSCode directly when you choose how to open it.
Install Espressif IDF Plugin
- It is generally recommended to use Install Online. If online installation fails due to network factor, use Install OIffline.
- For more information about how to install the Espressif IDF plugin, see Install Espressif IDF Plugin
Run the First ESP-IDF Demo
Demo

| Demo | Basic Description | Dependency Library |
|---|---|---|
| 01_ADC_Test | Read the current voltage value of the system | - |
| 02_I2C_PCF85063 | Print the real-time time of RTC chip | - |
| 03_I2C_QMI8658 | Print the original data sent by the IMU | - |
| 04_SD_Card | Load and display the information of the TF card | - |
| 05_WIFI_AP | Set to AP mode to obtain the IP address of the access device | - |
| 06_WIFI_STA | Set to STA mode to connect to WiFi and obtain an IP address | - |
| 07_LVGL_Test | LVGL demo | LVGL |
| 08_LVGL_SDIMG | Combine LVGL & SDCard & IMG demos | LVGL |
| 09_FactoryProgram | Comprehensive project | LVGL |
01_ADC_Test
Demo description
- The analog voltage connected through the GPIO is converted to digital by the ADC, and then the actual system voltage is calculated and printed to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- adc_bsp_init(void) : Initializes ADC1, including creating an ADC one-time trigger unit and configuring channel 3 for ADC1
- adc_get_value(float *value,int *data) : Reads the value of ADC1 channel 3 and calculates the corresponding voltage value based on the reference voltage and resolution, stores it at the position where the incoming pointer points to, and stores 0 if the read fails
- adc_example(void* parameter): Initialize ADC1 and then create an ADC task that reads the ADC value every 1 second and calculates the system's voltage based on the raw ADC value
Result demonstration
- After the program is flashed, open the monitoring device and you can see the output ADC values and voltage, as shown in the figure below:
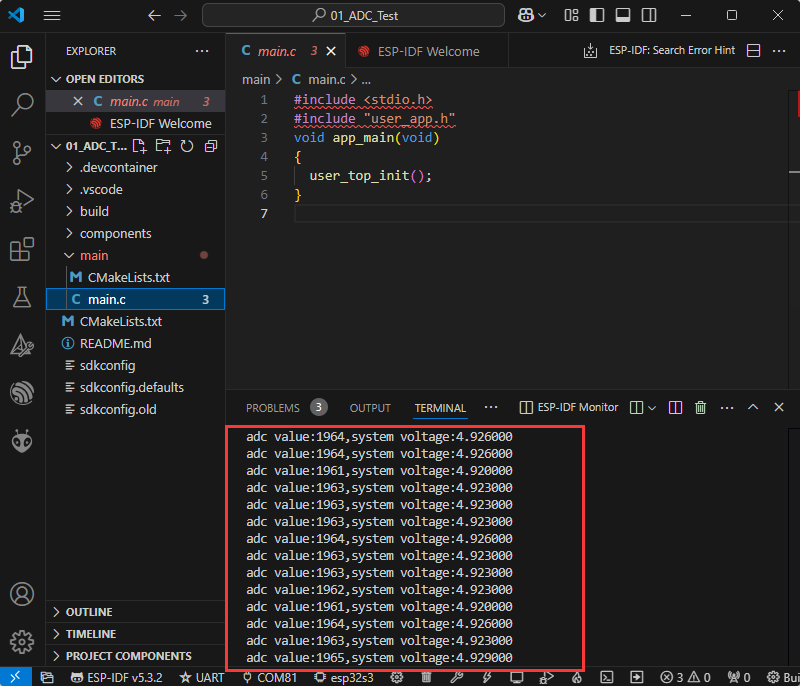
- The ADC sampling value is about 1960, and the system voltage is about 4.92V. For a detailed analysis, you can refer to the schematic diagram
02_I2C_PCF85063
Demo description
- Through the I2C protocol, initialize the PCF85063 chip, set the time, and then periodically read the time and print it to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- void PCF85063_example(void* parameter) : Create an RTC task to implement RTC functionality, read the clock from the RTC chip every 10 seconds and then output it to the terminal
Result demonstration
- After burning is completed, open the monitoring device to see the printed RTC time, as shown in the following figure:
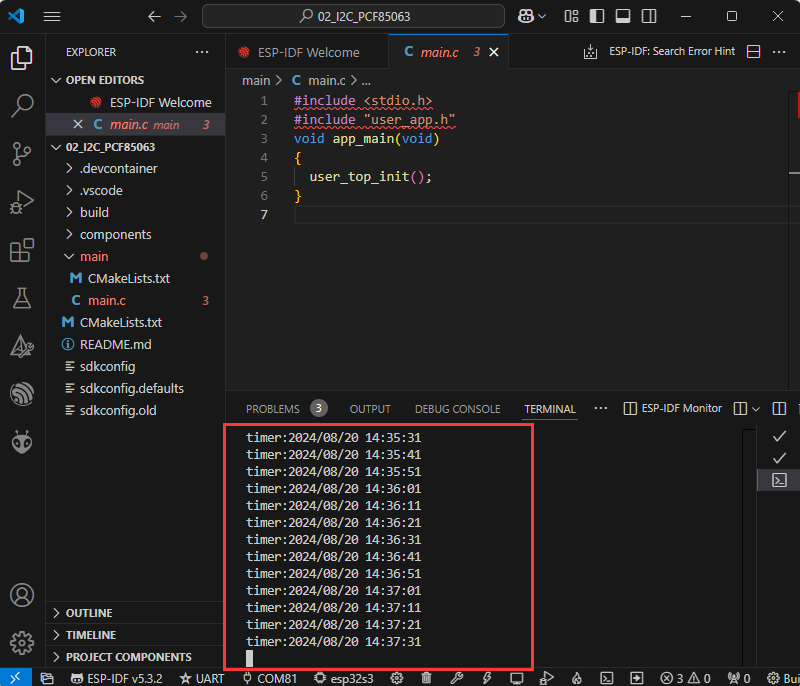
- Data is output every 10 seconds. If you need to modify or refer to it, you can directly access the PCF85063 source file for operations.
03_I2C_QMI8658
Demo description
- Through I2C protocol, initialize the QMI8658 chip, then read and print the corresponding attitude information every 1 second to the terminal
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- qmi8658c_example(void* parameter): The function initializes the QMI8658 device, reading and printing accelerometer data, gyroscope data, and temperature data in an infinite loop, once every second. During the rotation of the board, the gyroscope data increases with greater rotation speed, and the accelerometer calculates the corresponding acceleration based on the current position.
Result demonstration
After the demo is flashed, the running result of the device is as follows:
- Open the serial port monitoring, and you can see the original data output from the IMU (Euler angles need to be converted by yourself), as shown in the following figure:
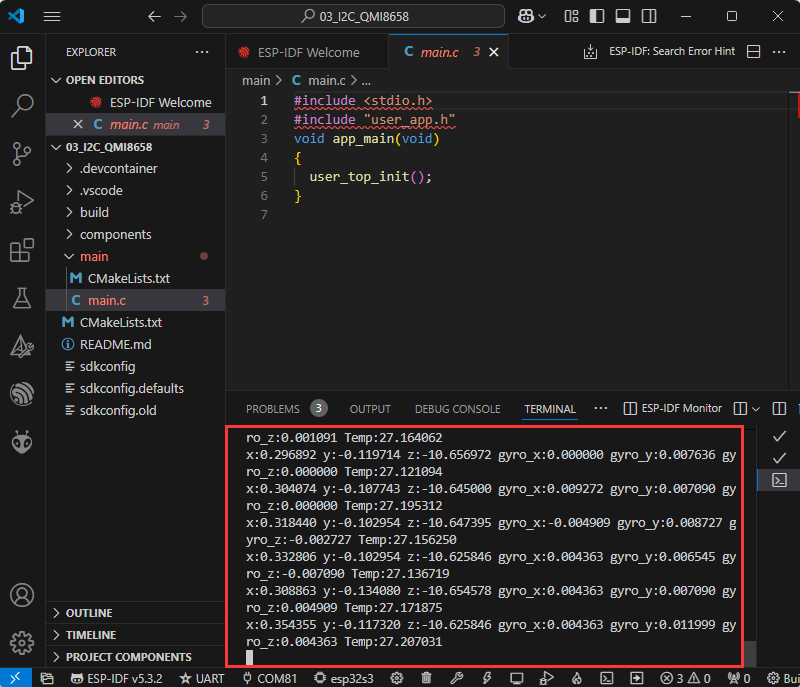
- You can see that it is output every 1 second. If you need to modify or refer to it, you can directly go to the qmi source file to modify it
04_SD_Card
Hardware connection
- Install a TF card on the board (you must insert a TF card with a capacity of less than 64G first), and use a USB cable to connect the board to the computer
Demo description
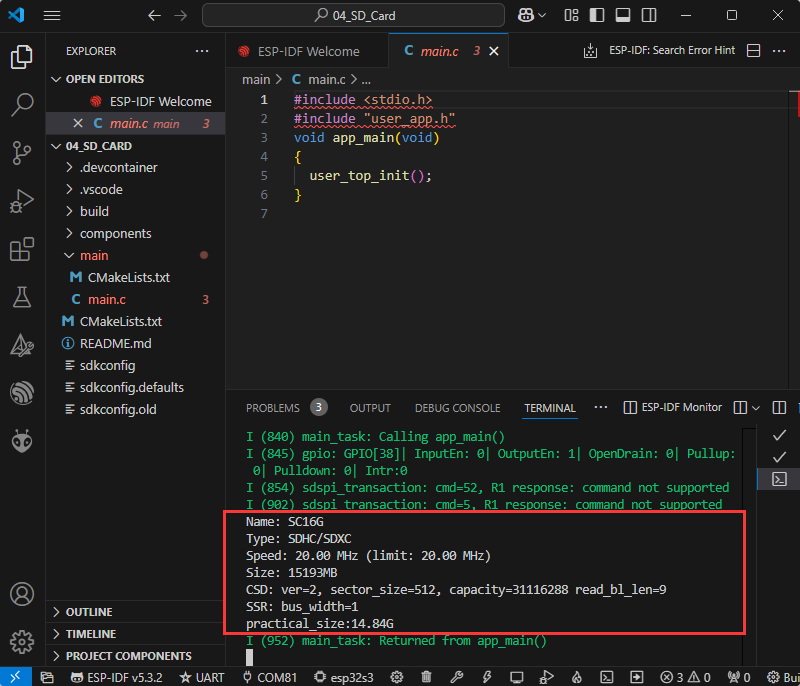
- Select SPI or SDMMC direction to drive the TF card through macro definition, and print the TF card information to the terminal after successfully mounting the TF card
Code analysis
- The communication protocol of the TF card can be implemented according to the user's choice, find the macro definition
SD_Read_Modeunder the source filesd_card_bsp.cpp, the macro definition uses the SDMMC communication protocol by default, which can be modified to SDSPI
#define SD_Read_Mode USER_SPI
Result demonstration
- Click on the serial port monitoring device, you can see the information of the output TF card, practical_size is the actual capacity of the TF card, as shown in the figure below:
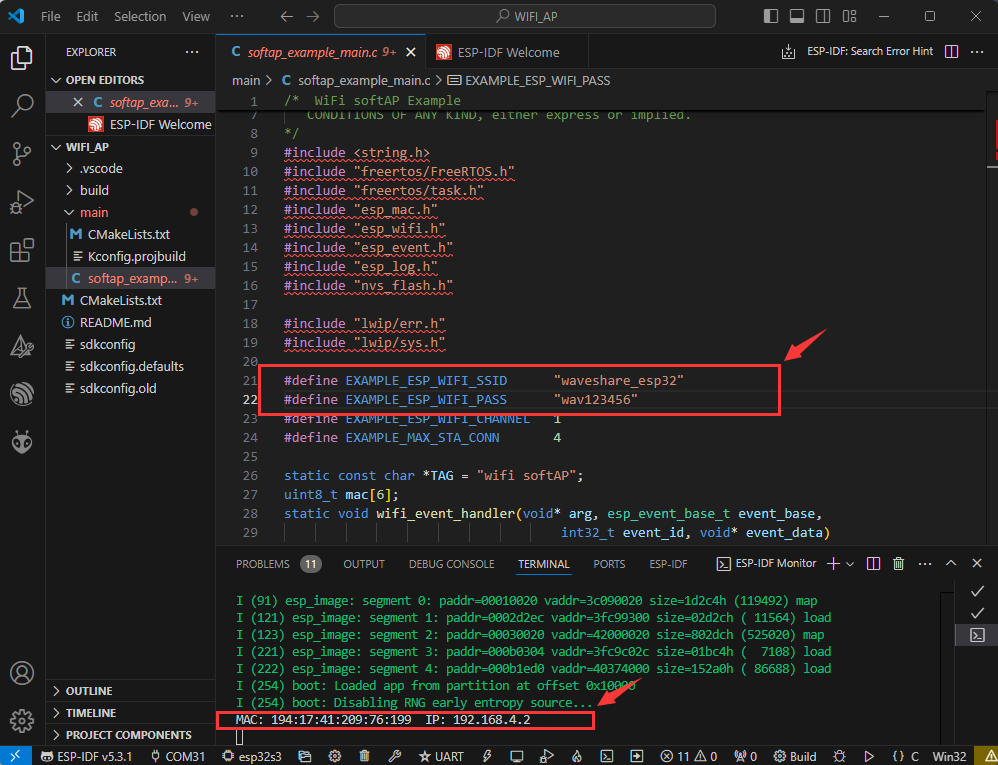
05_WIFI_AP
Demo description
- Use the development board as an AP waiting for STA terminal connection
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- wifi_init_softap(void): This function is used to initialize the ESP32's Wi-Fi soft access point, including setting up the network interface, registering event handling functions, configuring soft AP parameters, and starting the soft AP
Result demonstration
- When the chip is in AP mode, use the mobile phone to successfully connect to WIFI and the serial port will print the MACA address of the connected device and the IP address assigned to the device
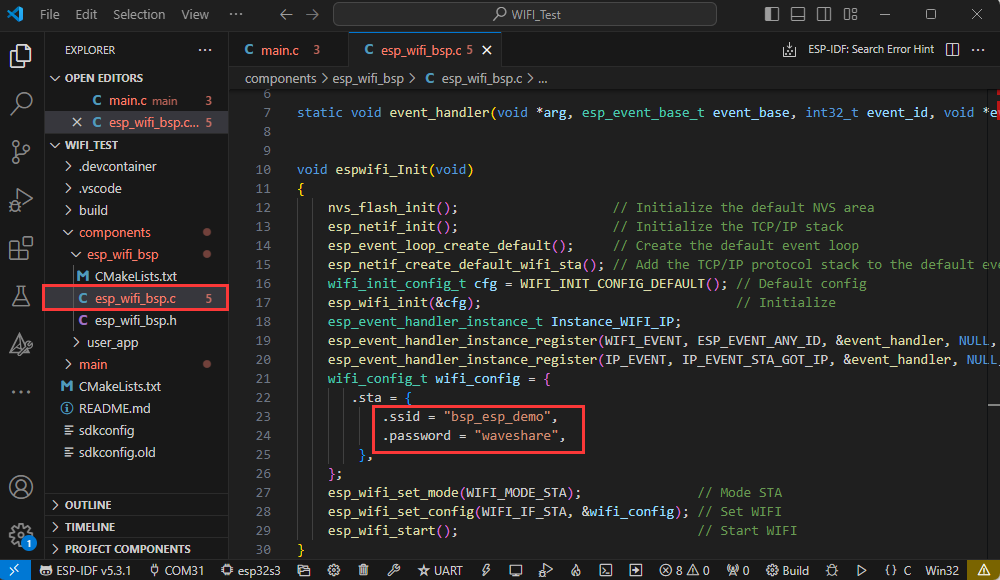
06_WIFI_STA
Demo description
- The development board is used as a terminal role, which can connect to the AP available in the environment, and print the obtained IP information to the terminal after successful connection
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- espwifi_Init(void): This function is used for WiFi initialization on ESP32. It sequentially initializes non-volatile storage, the TCP/IP stack, creates a default event loop and a default WiFi site network interface, initializes WiFi with the default configuration, registers event handlers to handle WiFi and IP-related events, sets WiFi connection parameters, and starts WiFi.
Code modification
This project implements the chip connecting to WIFI and obtaining an IP address while in STA mode. Before compiling and downloading the firmware, some code needs to be modified to the name and password of the available WIFI router in the current environment
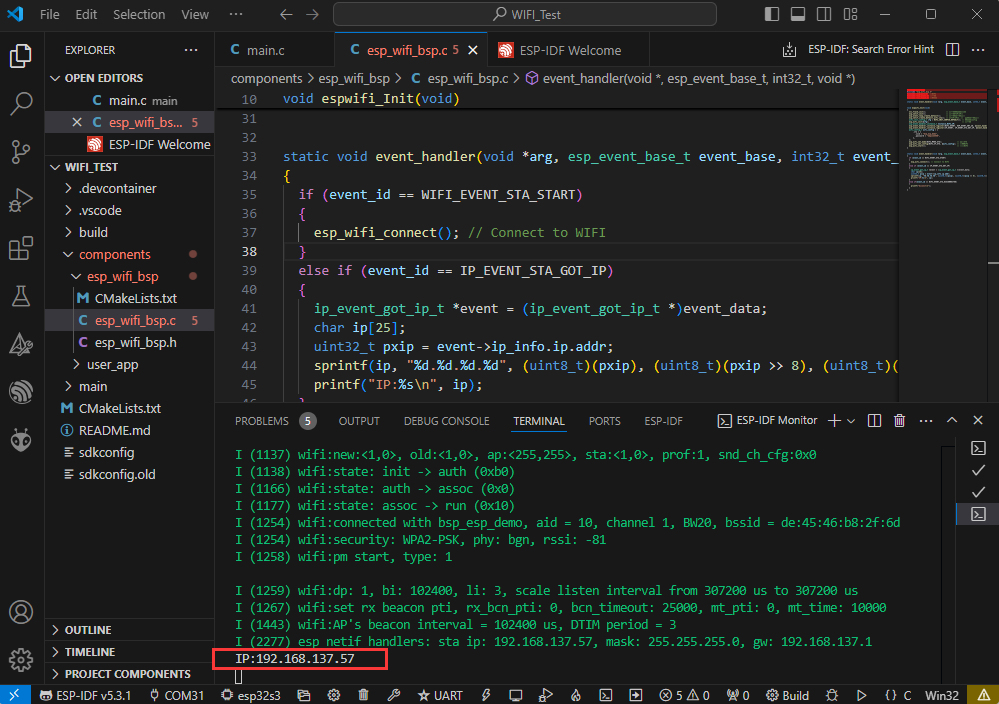
Result demonstration
After the demo is flashed, the running result of the device is as follows:
- The chip successfully connects to WIFI and obtains an IP address while in STA mode
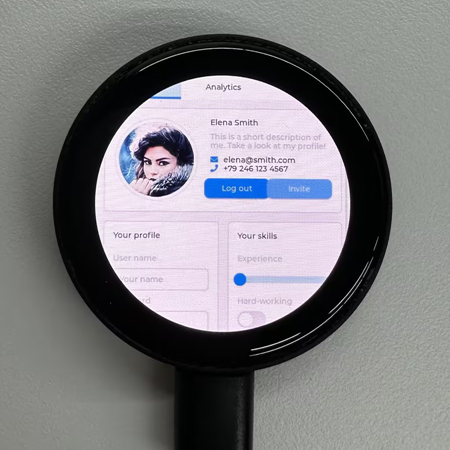
07_LVGL_Test
Demo description
- Implement some multifunctional GUI interfaces on the screen by porting LVGL
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- The display chip itself does not support hardware rotation. If rotation is needed, it can be achieved through software. You can find the macro definition
#define EXAMPLE_Rotate_90inmainfile and uncomment this macro definition. Software rotation performance is not as good as hardware rotation
#define EXAMPLE_Rotate_90
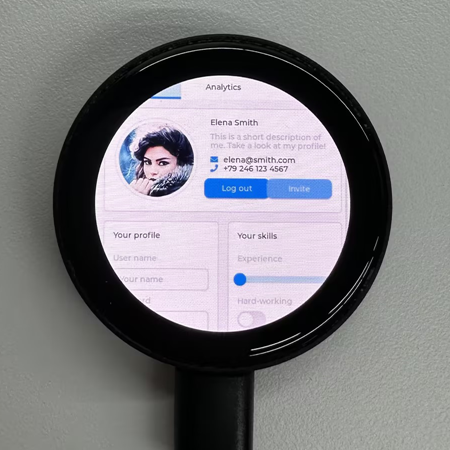
Result demonstration
- The LVGL demo has high requirements for RAM and ROM, so it is necessary to configure the demo according to the requirements of environment setup, and after the program is flashed, the running effect of the device is as follows:
08_LVGL_SDIMG
Demo description
- Store the images in png, jpg, and bmp formats on the TF card, then read the images from the TF card and display them on the LVGL interface
- Note :
- The images need to have a unified resolution of 320 x 240
- BMP images must be converted to RGB565 format
Hardware connection
- Connect the board to the computer using a USB cable
Code analysis
- The display chip itself does not support hardware rotation. If rotation is needed, it can be achieved through software. You can find the macro definition
#define EXAMPLE_Rotate_90inmainfile and uncomment this macro definition. Software rotation performance is not as good as hardware rotation
#define EXAMPLE_Rotate_90
Result demonstration
- Create a new directory Test under the TF card, put the required pictures into the directory, then insert the TF card into the board, power on normally, and the operation effect of the device is as follows:
- Clicking Scan IMG will scan the image files in the Test directory. The scan results are shown in the figure:
- Click on the corresponding image file name to jump to the corresponding image, as shown in the figure:

09_FactoryProgram
Demo description
- Comprehensive project, test the onboard function, this demo needs to pay attention to the version of IDF, V5.2.0 or above may not be able to scan the surrounding wifi. If you need to test, you can use the lower version of the compilation or use the BIN firmware we provide
Hardware connection
- Use a USB cable to connect the board to the computer (the display effect is default to software rotation by 90 degrees. If you don't need it, you can find the #define EXAMPLE_Rotate_90 macro definition in the main file and comment it out)
Result demonstration
- Swipe left or right to switch pages, first display RGB colors every 1.5 seconds, which can be used to observe if there are any issues with the screen



- After the RGB is displayed, it will automatically jump to the clock interface

- Swipe left on the interface, you can see that this page contains some built-in hardware information

- Swipe left again, you can see that the interface is a functional interface

- You can click on the WIFI icon to enter the WIFI test interface, then click the Scan button to scan the surrounding WIFI
- Click Exit to return to the previous interface, then click the BLE flag to enter the BLE test interface, and then click the Scan button to scan the surrounding BLE

- The final interface is for backlight adjustment, where you can slide the slider to adjust the backlight brightness

Flash Firmware Flashing and Erasing
- The current demo provides test firmware, which can be used to test whether the onboard device functions properly by directly flashing the test firmware
- Binary file path:
..\ESP32-S3-Touch-LCD-1.43-Demo\Firmware
Resources
Schematic Diagram
Demo
3D File
Datasheets
ESP32-S3
Other Components
Software Tools
Arduino
- Arduino IDE Official download link
- ESP32-Arduino official documentation
- Arduino-ESP32 offline component package
VScode
Firmware Flashing Tool
Other Resource Links
FAQ
Question: After the module downloads the demo and re-downloads it, why sometimes it can't connect to the serial port or the flashing fails?
- Long press the BOOT button, press RESET at the same time, then release RESET, then release the BOOT button, at this time the module can enter the download mode, which can solve most of the problems that can not be downloaded.
Question: Failed to set up the VSCode environment?
- First consider the network issue, try switching to another network
Question: Error when compiling an Arduino program?
- Check if the Arduino IDE -> Tools is correctly configured
Question: Is it stuck when sliding pictures displayed?
- Modify LVGL display cache to the full screen size
- Modify the LV_IMG_CACHE_DEF_SIZE option in the configuration to 1000 to achieve some optimization
Question: Can't display Chinese?
- Basic Chinese can be displayed, but if it is a rare character, it cannot be displayed
- You can transcode the required rare characters through the transcoding software, and then add them to the project font library
Question: How to deal with the first compilation of the program being extremely slow?
- It's normal for the first compilation to be slow, just be patient
Question: How to handle the display "waiting for download..." on the serial port after successfully ESP-IDF flashing?
- If there is a reset button on the development board, press the reset button; if there is no reset button, please power it on again
Question: What should I do if I can't find the AppData folder?
- Some AppData folders are hidden by default and can be set to show.
- English system: Explorer->View->Check "Hidden items"
- Chinese system: File Explorer -> View -> Display -> Check "Hidden Items"
Question: How do I check the COM port I use?
- Windows system:
①View through Device Manager: Press the Windows + R keys to open the "Run" dialog box; input devmgmt.msc and press Enter to open the Device Manager; expand the "Ports (COM and LPT)" section, where all COM ports and their current statuses will be listed.
②Use the command prompt to view: Open the Command Prompt (CMD), enter the "mode" command, which will display status information for all COM ports.
③Check hardware connections: If you have already connected external devices to the COM port, the device usually occupies a port number, which can be determined by checking the connected hardware.
- Linux system:
①Use the dmesg command to view: Open the terminal.
①Use the ls command to view: Enter ls /dev/ttyS* or ls /dev/ttyUSB* to list all serial port devices.
③Use the setserial command to view: Enter setserial -g /dev/ttyS* to view the configuration information of all serial port devices.
Question: Why does the program flashing fail when using a MAC device?
- Install MAC Driver and flash again.
Question: How to choose between a lithium battery and an RTC battery?
- Normally, 3.7V-4.2V lithium batteries without a casing can be directly plugged into the PH1.25 interface, and those with a casing can be connected through the VBAT and GND terminals.
- The RTC battery range is 1.5 to 3.3V, and the terminal interface adopts SH1.0.
Question: How to use SquareLine Studio to design interfaces?
- Please refer to SquareLine Studio tutorial
Support
Monday-Friday (9:30-6:30) Saturday (9:30-5:30)
Mobile: +86 13434470212
Email: services01@spotpear.com

[Tutorial Navigation]
- Usage Instructions
- Working with Arduino
- Working with ESP-IDF
- Flash Firmware Flashing and Erasing
- Resources
- FAQ
- Question: After the module downloads the demo and re-downloads it, why sometimes it can't connect to the serial port or the flashing fails?
- Question: Failed to set up the VSCode environment?
- Question: Error when compiling an Arduino program?
- Question: Is it stuck when sliding pictures displayed?
- Question: Can't display Chinese?
- Question: How to deal with the first compilation of the program being extremely slow?
- Question: How to handle the display "waiting for download..." on the serial port after successfully ESP-IDF flashing?
- Question: What should I do if I can't find the AppData folder?
- Question: How do I check the COM port I use?
- Question: Why does the program flashing fail when using a MAC device?
- Question: How to choose between a lithium battery and an RTC battery?
- Question: How to use SquareLine Studio to design interfaces?
- Support