



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Jetson Series
- >
- Jetson Kits
Jetson Nano JetBot AI Kit Assemble Manual User Guide
JetBot AI Kit Assembly
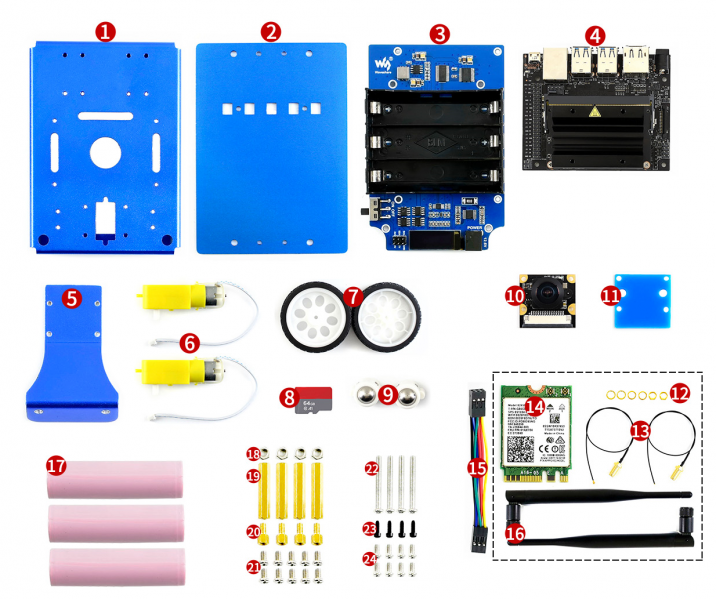
- Components and screws
- Please check the components and screws
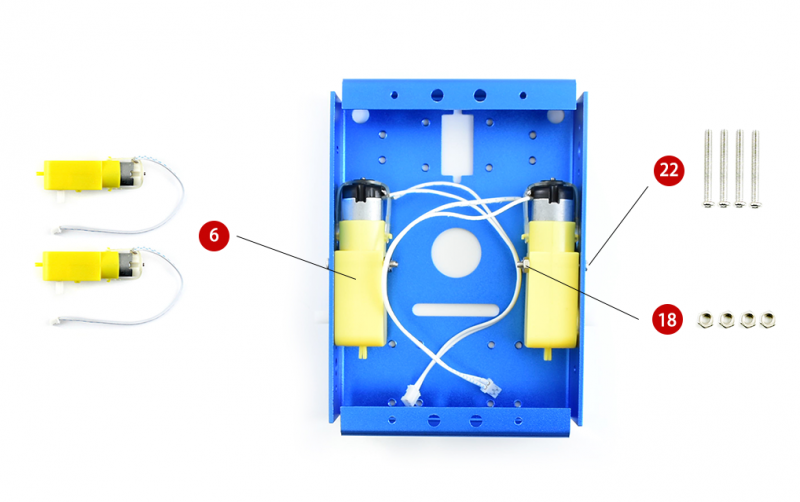
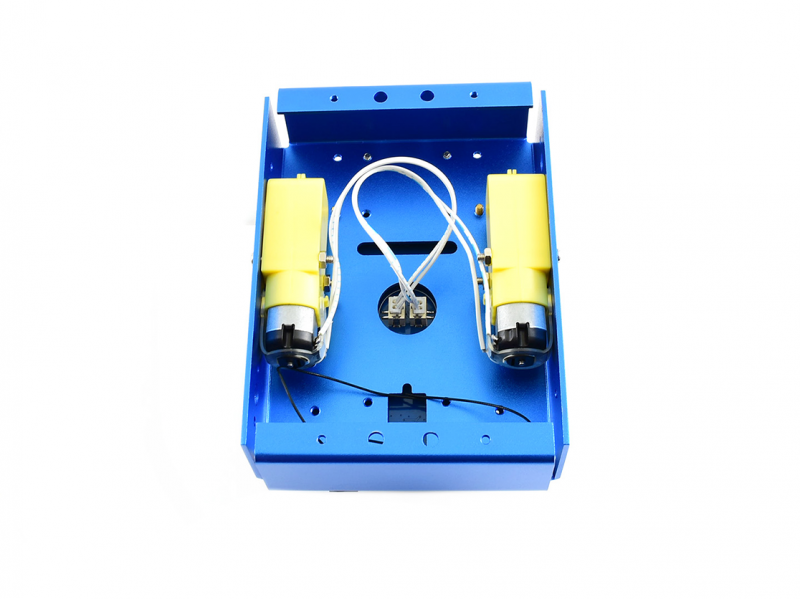
1. Assemble motors
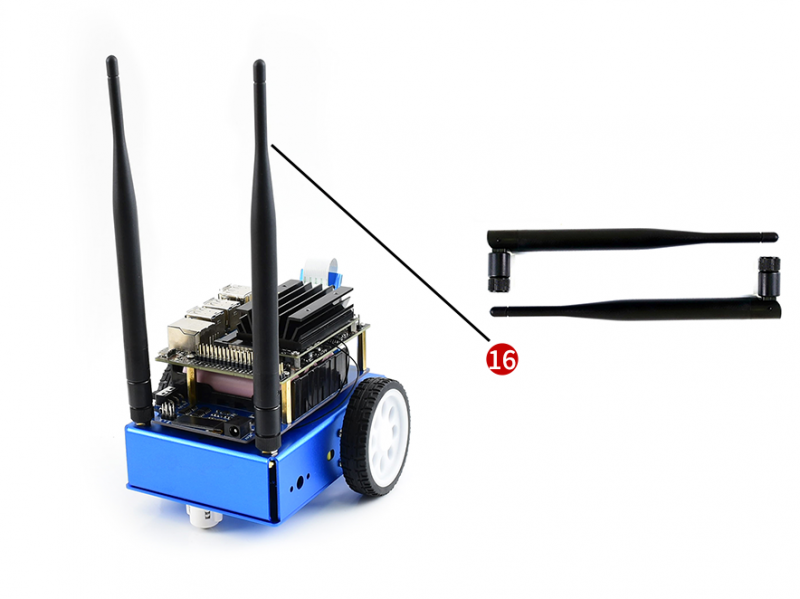
2. Assemble the antennas

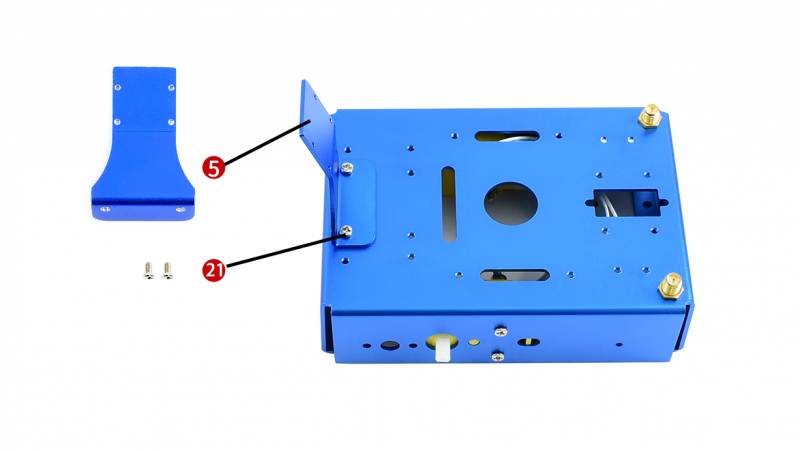
3. Mounting the Camera holder to metail box
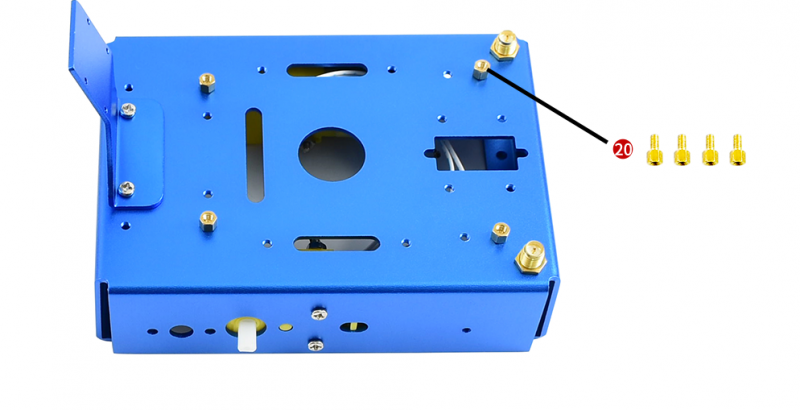
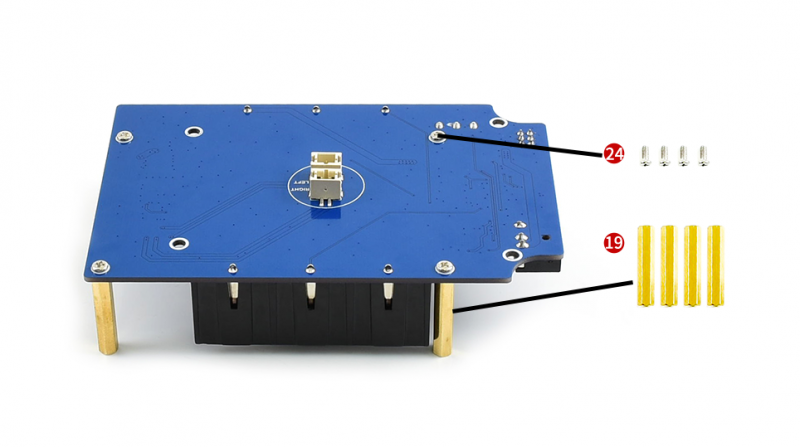
4. Set standoffs on metal box for assembling JetBot expansion board
5. Set standoffs on jetbot expansion board for assembling jetson nano developer kit
6. Assemble Jetbot expansion board, adjust place of antennas
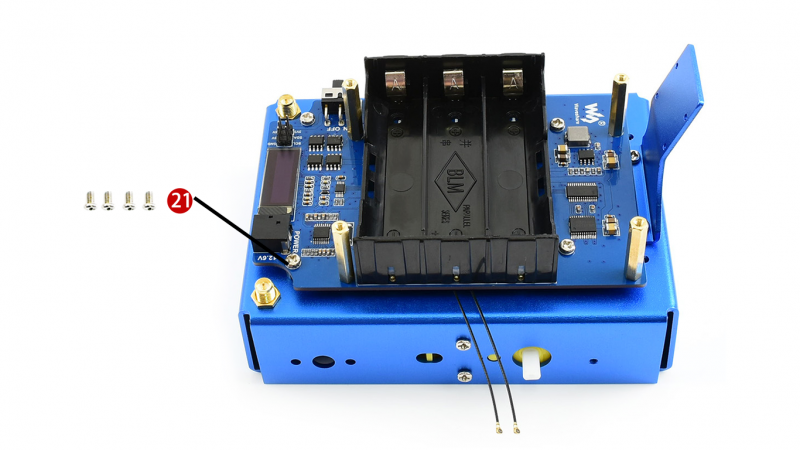
- Connect motors to jetbot expansion board, connect left motor to the left interface, and right to the right
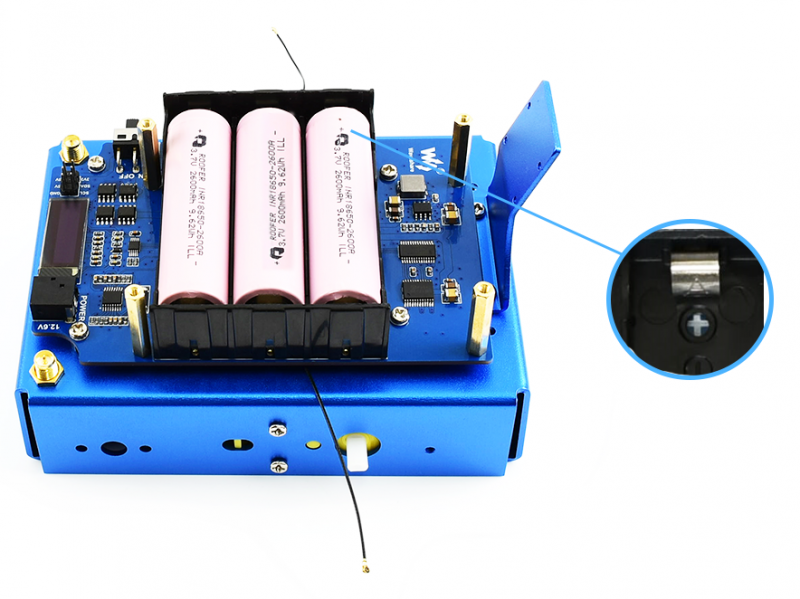
7. Mounting 18650 batteries to batteries holder, note that you should recognize direction of batteries according to the white screen silk printing.
8. Turn out screws from Omni-direction wheels, then fixing the wheels to metal bottom board
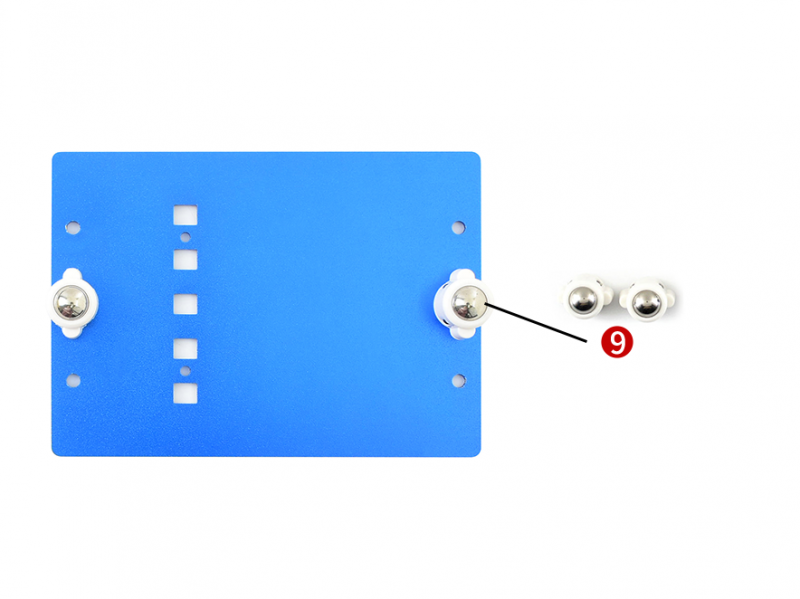
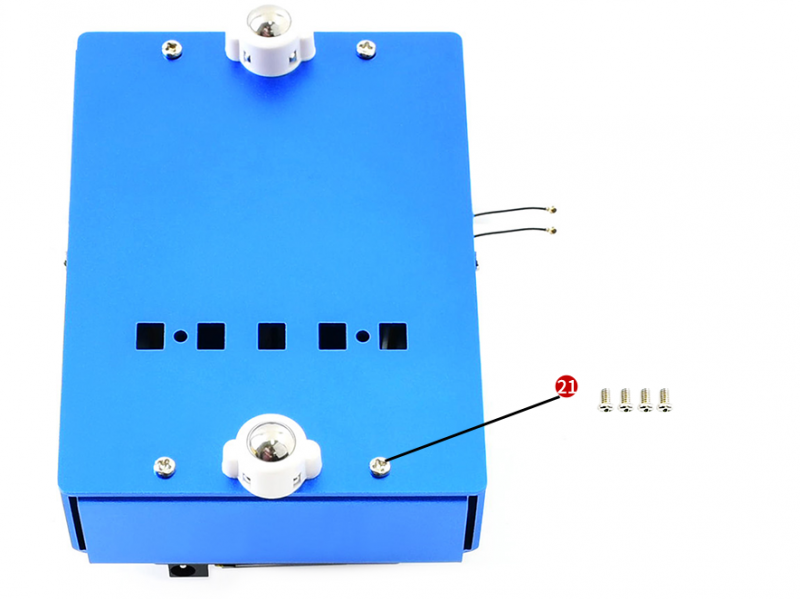
9. Assemble metal box
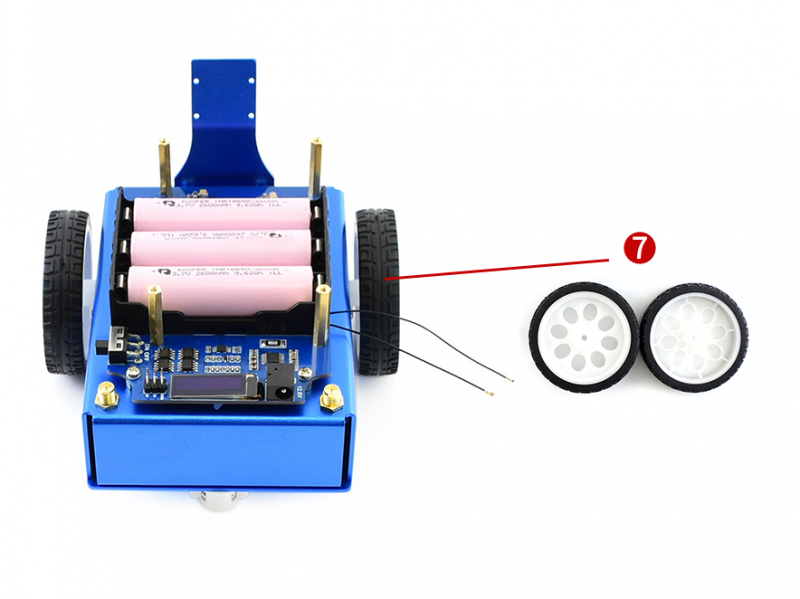
10. Assemble wheels
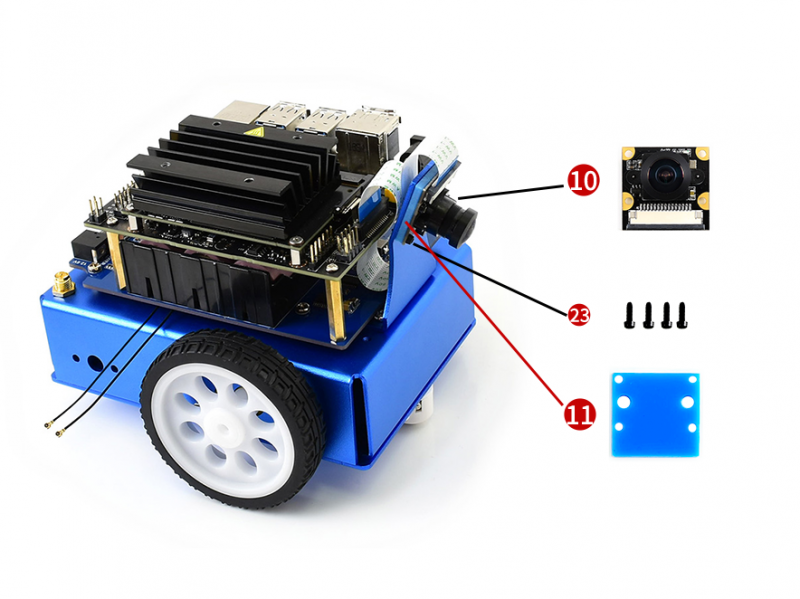
11. Assemble camera, don't forget the set the Acrylic piece between holder and camera
12. Take out the jetson nano board, and assemble wireless-AC 8265

13. Connect antennas
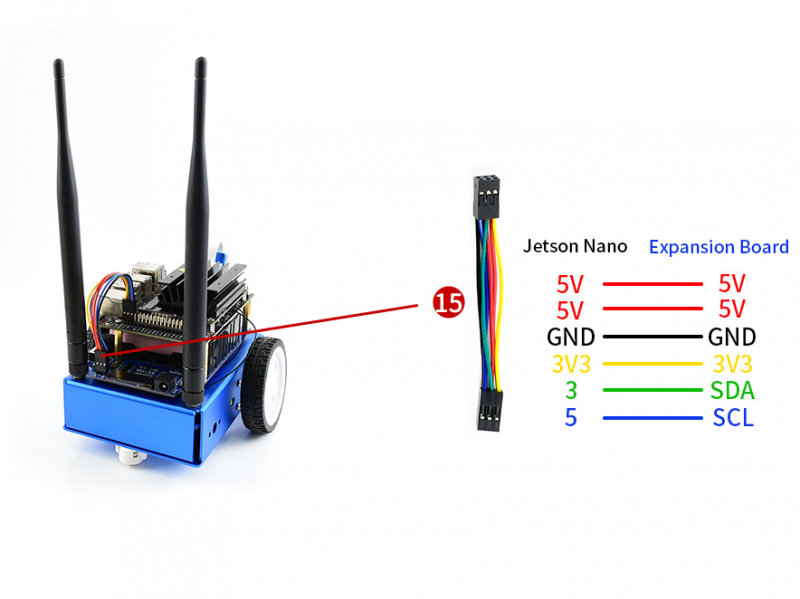
14. Finally, connect the 8PIN cable according to screen silk printing.
TAG:
Raspberry Pi Triple LCD HAT
ESP32-S3 AI 1.54-inch (G) e-Paper Ink Screen 1.54inch Display AIoT Development Board Deepseek
ESP32 LVGL
Jetson Nano 5G module
Spotpear
BPI
Raspberry Pi Pico 2 RP2350 3.5 inch LCD Capacitive 3.5inch TouchScreen Development Board 240x320 Display QMI8658 6-Axis /OV5640 Camera /SD
Luckfox Pico
DeepSeek AI Voice Chat ESP32 S3 Development Board 2.06-inch AMOLED Display 410×502 2.06inch TouchScreen Programmable Watch
Raspberry Pi 7 inch HMI industrial DSI Display LCD 7inch TouchScreen Computer 720×1280
Sipeed Lichee Tang Nano 9K FPGA MINI Development Board GW1NR-9 GOAI Gowin
Raspberry Pi 5 D
ESP32 1.54 inch E-Paper Smart Watch display Screen 200x200 Ultra-low power For Arduino/Micropython/RTOS For Watchy
Horizontal Drag Instructions
Raspberry Pi Monitor Official Original DisplayScreen 15.6 inch LCD Full HD 1920x1080 15.6inch
4inch Round LCD HDMI Capacitive Touchscreen Display 720x720 For Raspberry Pi/Jetson Nano/mini PC
Milk-V Duo Wiki
Spotpear
1.28inch Round LCD
Raspberry Pi 5 Aluminium Case

TAG:
Raspberry Pi Camera V1V2
Spotpear
Raspberry-Pi-Pico-2-RP2350-ETH-CH9120 TCP UDP C C++ MicroPython Arduino
Raspberry Pi 5 PCIe to SSD
SIM8260G M2 3G/4G/5G/GNSS/GPS Sub-6G PCIe M.2 Moudle For LTE-A/NSA/SA For DFOTA /VoLTE For SIMCOM
Raspberry Pi 5 PD Activation
T-Embed ESP32-S3 CC1101 LILYGO
First-level Agency
Allwinner
UART To CAN
Raspberry Pi RP2040 1.28inch Round LCD
Case For SeeedStudio XIAO OLED Basic Board
ESP32 1.9 inch LCD Capacitive TouchScreen 1.9inch Display ST7789 170x320 for Arduino /Raspberry Pi /Pico
ESP32 C3
Pi5 Official Active Cooler
Modbus RTU
USB CAN Analyzer
Raspberry Pi WatchDog
ESP32 S3 Development Board 2.8 inch LCD Capacitive Touch Screen 2.8inch Display 240×320 N16R8
Raspberry Pi Refractive Prism