



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
SC09-Servo User Guide
Overview
SC09 Servo is a mini and compact dual-shaft serial bus servo, which can control within a range of 300° and can be programmed to switch to continuous rotation motor/stepper motor mode. There is an interface on the servo, which can be used in series to control 253 bus servos at the same time and each servo can get its current angle, load, voltage, mode, and other information. It is suitable for the robotic arm, hexapod robot, a humanoid robot, wheeled robot, and other robotic projects that require feedback on servo angle and load.
Specification
- Input voltage VIN: 4.8-8.4V
- Mechanism limit angle: no limit
- Rotation angle: 300° (0~1023)
- Baud rate: 38400bps~1Mbps
- Gear type: high-precision metal gear
- No-load speed: 0.1sec/60° (100RPM)@6V
- Position sensor resolution: 0.293° (300°/1024)
- ID range: 0-253
- Feedback information: Position, Load, Speed, Input Voltage
- No-load current: 150mA@6V
- Locked-rotor current: 1.0A
- Dimensions: 23.2×12.0×25.5mm
Feature
- Can be used in series to control up to 253 servos simultaneously (assuming adequate power supply) and obtain feedback from each servo.
- Wide voltage input 4.8-8.4V.
- Locked-rotor torque up to 2.3kg.cm@6V.
- High precision, angle control accuracy up to 300°/1024.
- Programmable operating mode: servo mode angle control/motor mode with continuous rotation.
How to Use the Hardware
- You can use our Servo Driver to control the bus servo.
- If you want to use the bus servo in your own project, you can refer to the following schematic diagram:
Serial bus servo drive circuit schematic.
Product Usage Tutorial
- The following tutorial uses servo driver by default to explain how to use the servo, if you need to use it in your own project, you can refer to the sample program and the bus servo drive circuit for secondary development.
- The factory default ID of the servo is 1. Among the servos connected to the same servo drive board, the same ID can only correspond to one servo, and there cannot be more than one servo with the same ID in the one control circuit. When you set the ID for the servo, try to ensure that only one servo whose ID is to be changed is connected to the driver board. After the ID is changed, it will be permanently saved in the servo and will not be lost even if the power is off.
- First of all, you need to set an independent ID for each servo. When setting an ID for one servo, the driver board should not be connected to other servos.
- If you use the ST3215 servo, after connecting it to the driver board, you need to provide 6-12.6V (12V is recommended) via the DC port (5.5*2.1mm) on the board, and the port will directly power the servo. If you use a large number of servos, you need to provide enough currents for the port.
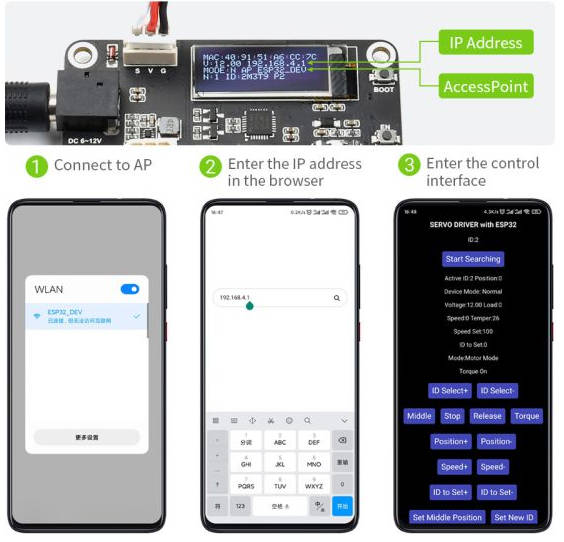
- After the driver board is powered on, a WiFi hotspot will be created by default. The default hotspot name is ESP32_DEV, and its password is 12345678. Please connect to this hotspot with your phone.
- After connecting to the hotspot issued by the servo driver board, it is recommended to use Google Chrome to access the address 192.168.4.1. Noted that the phone will fail to verify the server with ping after connecting the WiFi, so it may automatically switch to the other known WiFi. In this case, you should connect ESP32_DEV again, and the phone will not connect to other WiFi automatically after the reconnection is successful.
- The driver board will automatically scan the servo ID (0-20) when it is powered on (in order to save the boot time). If your servo ID is more than 20, you must change the MAX_ID value in ServoDriverST.ino and upload it to the driver board again.
- If the servo is connected after the driver board is powered on, you need to click Start Searchingon the mobile browser page to scan again.
- Active IDis the currently selected servo ID number, ID to Setis the new ID number to be set, adjust the value of ID to Setthrough ID to Set+andID to Set-, and press the Set New ID button to set the servo ID Active ID as ID to Set.
- When the IDs of all servos are set, you can connect them all. If you do not restart the device, you need to clickStart Searchingto scan all servos.
- ID: shows all ID numbers of servos currently connected to the servo driver board.
- Active ID The currently selected servo ID number, and the subsequent operations are all controlling thisActive ID servo.
- You can select the Active ID servo via the ID to Set+ and ID to Set- buttons.
- Middlekey, you can turn the servo to the middle position, the position range of the servo is 0-4095, and the middle position is 2047. The rotation range of SC series servos is from 0 to 1023, with the middle position at 511.
- Stopkey, the default program will not let the servo move all the time. If the servo cannot be stopped after the secondary development, you can press the Stop key to hault the servo movement.
- Releasekey, press it and the servo will close torque lock (Torque Off), then you can turn the servo by hand.
- Torquekey, after pressing the servo, the servo will turn on the torque lock (Torque On), at this time, the servo will maintain the specified position with force.
- Position+key, after pressing the servo, the servo will start to rotate clockwise. When the servo is in the servo mode, it will not continue to rotate after turning to the 4095 position.
- Position-key, after pressing the servo, the servo will start to rotate counterclockwise. When the servo is in the servo mode, it will not continue to rotate after turning to the 0 position.
- Speed+ and Speed- are used to set the speed of the servo. The maximum setting for ST series servos is about 3073. The speed is the number of steps per second, 50 steps/sec≈0.732RPM.
- Set Middle Positionkey, no matter what position the current servo is in, when this key is pressed, the servo will set the current position to the middle position (2047). Only ST series servos support this function.
- Set Servo Modekey, set the servo to servo mode, 360° absolute angle control can be performed in the servo mode, the setting will be permanently saved and will not be lost even if the power is turned off.
- Set Motor Modekey, set the servo to stepper motor mode, the servo can rotate continuously 30,000 steps. If you press it continuously, the motor will keep rotating. This mode can control the relative angle within ±7 circles and the number of circles will not be saved when power is off, but the stepper motor mode settings will be permanently saved even if power is off.
- Start Serial Forwardingbutton, set the servo driver board to serial forwarding mode, you can directly control the servo and get the feedback of the servo with the typeC interface on the board. This function is used to debug the servo.
- Normalkey, set the servo driver board to normal mode, in this mode, it will not send or receive any information via ESP-NOW.
- Leaderkey, set the servo driver board as the host, in this mode, the driver board continuously sends the ID, position, and speed of the current Active ID servo to the driver board of the controlled slave through the ESP-NOW protocol. After the servo driver board is turned on, the MAC:on the first line of the screen is the MAC address of this development board, which is unique, such as MAC: 08 3A F2 93 5F A8. The premise of ESP-NOW communication is to get the MAC address of the slave, please write down the address, and fill it in the broadcastAddress[] = {0x08, 0x3A, 0xF2, 0x93, 0x5F, 0xA8} of ServoDriverST.ino, then upload it to the driver of the host and the function is enabled.
- Followerkey, set the servo drive board as the slave, after changing the MAC address of the slave in the program of the host, it can act under the remote control of the host.
- RainbowONand RainbowOFFkeys are used to turn on and off the rainbow effect of RGB lights.
Secondary Development Tutorial
Arduino IDE usage guide:
- Download the sample demo compressed package: sample example
- After unzipping, you can copy the SCServo file folder to \Documents\Arduino\libraries to install the library for controlling the servo.
You can refer to the demo in \examples\arduinoIDE\SCSCL to learn how to control the servo and get feedback information from the servo. The functions described below are provided in the Serial bus servo driver board with GUI demos that are newbie friendly.
- Servo initialization
Each program for controlling the servo needs to initialize the servo before it can be used.
#include <SCServo.h>
SCSCL sc;
void setup(){
Serial1.begin(1000000); //initialize the serial port, you can also choose to customize the serial port if you use a device such as ESP32
// Serial1.begin(1000000, SERIAL_8N1, RX, TX); // Customized serial port
sc.pSerial = &Serial1;
while(!Serial1) {}
}- Change servo ID
In the servos connected in series, each ID corresponds to only one servo, otherwise, the information fed back by the servos cannot be obtained normally. When changing the servo ID, please try to ensure that the driver board is connected to only one servo, and the ID will be permanently saved in the servo.
#include <SCServo.h>
SCSCL sc;
int ID_ChangeFrom = 1; //The original ID of the servo to change ID, the factory default is 1.
int ID_Changeto = 2; // New ID
void setup(){
Serial1.begin(1000000);
sc.pSerial = &Serial1;
while(!Serial1) {}
sc.unLockEprom(ID_ChangeFrom); //Unlock EPROM-SAFE
sc.writeByte(ID_ChangeFrom, SCSCL_ID, ID_Changeto);//Change ID
sc.LockEprom(ID_Changeto); // Lock EPROM-SAFE
}
void loop(){
}- Ping
Used to test whether a servo is connected normally.
#include <SCServo.h>
SCSCL sc;
int TEST_ID = 3; //Servo ID to test
void setup()
{
Serial.begin(115200);
Serial1.begin(1000000, SERIAL_8N1, RX, TX); // custom serial port
sc.pSerial = &Serial1;
while(!Serial1) {}
}
void loop()
{
int ID = sc.Ping(TEST_ID);
if(ID!=-1){
Serial.print("Servo ID:");
Serial.println(ID, DEC);
delay(100);
}else{
Serial.println("Ping servo ID error!");
delay(2000);
}
}
sc.pSerial = &Serial1;
while(!Serial1) {}
}- Write Position
Can be used to control the rotation of individual servos.
#include <SCServo.h>
SCSCL sc;
void setup()
{
Serial1.begin(1000000);
sc.pSerial = &Serial1;
while(!Serial1) {}
}
void loop()
{
sc.WritePos(1, 1000, 0, 1500); //Control the servo with ID 1 to rotate at 1500 to the position of 1000.
delay(754);//[(P1-P0)/V]*1000+100
sc.WritePos(1, 20, 0, 1500); //Control the servo with ID 1 to rotate to position 20 at 1500.
delay(754);//[(P1-P0)/V]*1000+100
}- Synchronous Write
Can be used to control multiple servos at the same time (turn to different positions and different speeds).
#include <SCServo.h>
SCSCL sc;
byte ID[2];
u16 Position[2];
u16 Speed[2];
void setup()
{
Serial1.begin(1000000);
sc.pSerial = &Serial1;
delay(1000);
ID[0] = 1;
ID[1] = 2;
}
void loop()
{
Position[0] = 1000;
Position[1] = 1000;
Speed[0] = 1500;
Speed[1] = 1500;
sc.SyncWritePos(ID, 2, Position, 0, Speed);//Servo((ID1/ID2)) moves at max speed=1500, moves to position=1000.
delay(754);//[(P1-P0)/V]*1000+100
Position[0] = 20;
Position[1] = 20;
Speed[0] = 1500;
Speed[1] = 1500;
sc.SyncWritePos(ID, 2, Position, 0, Speed);//Servo((ID1/ID2)) moves at max speed=1500, moves to position=20.
delay(754);//[(P1-P0)/V]*1000+100
}- Get Servo Information Feedback
#include <SCServo.h>
SCSCL sc;
int ID_input = 1;
void setup()
{
Serial1.begin(1000000, SERIAL_8N1, S_RXD, S_TXD);
Serial.begin(115200);
sc.pSerial = &Serial1;
delay(1000);
}
void loop()
{
int Pos;
int Speed;
int Load;
int Voltage;
int Temper;
int Move;
if(sc.FeedBack(ID_input)!=-1){
Pos = sc.ReadPos(-1);
Speed = sc.ReadSpeed(-1);
Load = sc.ReadLoad(-1);
Voltage = sc.ReadVoltage(-1);
Temper = sc.ReadTemper(-1);
Move = sc.ReadMove(-1);
Serial.print("Position:");
Serial.println(Pos);
Serial.print("Speed:");
Serial.println(Speed);
Serial.print("Load:");
Serial.println(Load);
Serial.print("Voltage:");
Serial.println(Voltage);
Serial.print("Temper:");
Serial.println(Temper);
Serial.print("Move:");
Serial.println(Move);
delay(10);
}else{
Serial.println("FeedBack err");
delay(500);
}
Pos = sc.ReadPos(1);
if(Pos!=-1){
Serial.print("Servo position:");
Serial.println(Pos, DEC);
delay(10);
}else{
Serial.println("read position err");
delay(500);
}
Voltage = sc.ReadVoltage(1);
if(Voltage!=-1){
Serial.print("Servo Voltage:");
Serial.println(Voltage, DEC);
delay(10);
}else{
Serial.println("read Voltage err");
delay(500);
}
Temper = sc.ReadTemper(1);
if(Temper!=-1){
Serial.print("Servo temperature:");
Serial.println(Temper, DEC);
delay(10);
}else{
Serial.println("read temperature err");
delay(500);
}
Speed = sc.ReadSpeed(1);
if(Speed!=-1){
Serial.print("Servo Speed:");
Serial.println(Speed, DEC);
delay(10);
}else{
Serial.println("read Speed err");
delay(500);
}
Load = sc.ReadLoad(1);
if(Load!=-1){
Serial.print("Servo Load:");
Serial.println(Load, DEC);
delay(10);
}else{
Serial.println("read Load err");
delay(500);
}
Move = sc.ReadMove(1);
if(Move!=-1){
Serial.print("Servo Move:");
Serial.println(Move, DEC);
delay(10);
}else{
Serial.println("read Move err");
delay(500);
}
Serial.println();
}