



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Jetson Series
- >
- Jetson Acc
Jetson Orin Nano JETSON-ORIN-CASE-A User Guide
How to Assemble
- Before assembling, you can first confirm that all the accessories are complete.

Among them, the list of ⑬ screw packages includes:- Jumper cap
- M3 screws
- M2 nylon pillar
- M2 nylon screws
- M2 nylon nut
- M3 black flat-head screws
- M2.5 silver screws
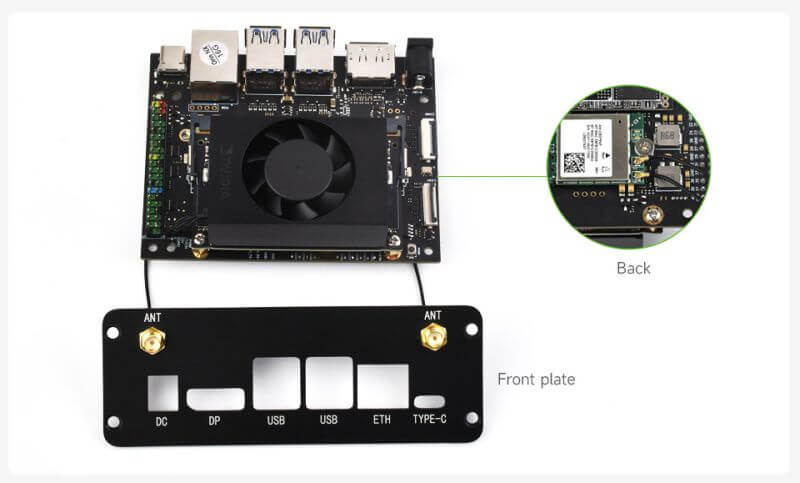
- Remove the base of the Jetson Orin Nano/NX and also remove the PCB antenna of the wireless card. Please keep the removed parts for future after-sales and service purposes to restore the board when needed.
- Install the IPEX4 to SMA cable to the front plate. To fix the SMA connector, you need to unscrew the fixed nut of the cable and lock it on the outside of the front plate. The other end of the IPEX4 to SMA cable cable is connected to the wireless card on the back.
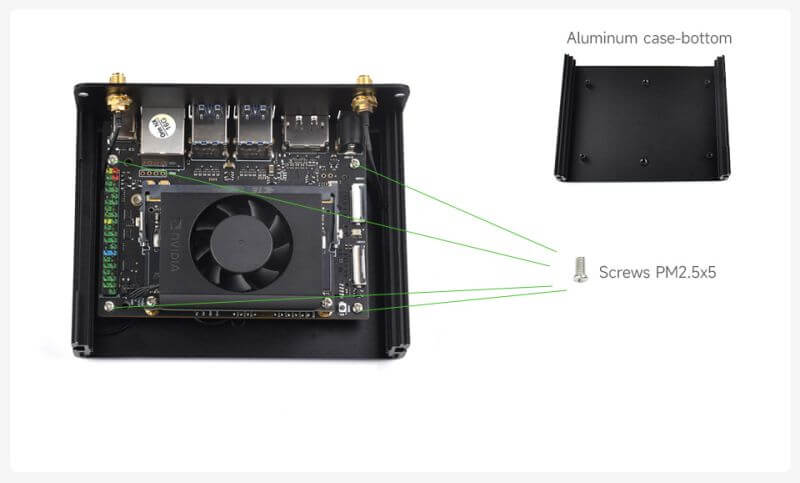
- Fix the Jetson Orin Nano/NX module to the aluminum bottom case with M2.5 silver screws, and simultaneously fix the front plate to the aluminum bottom plate with M3 black flat-head screws.
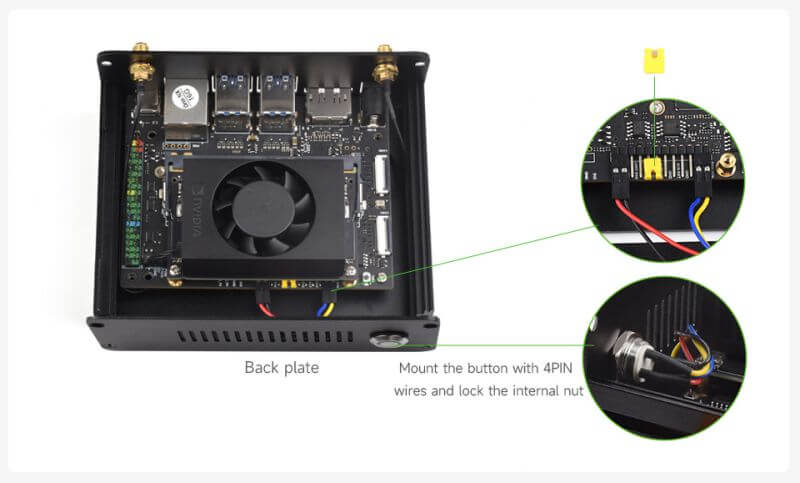
- Insert a jumper cap into the AUTO ON and DIS pins on the module. Unscrew the nut with the LED button and secure it to the back plate. Connect the button wires to the PWR BTN/GND and LED pins on the module.
- Note that the red wire should be connected to LED+, the black wire to LED-, and the yellow and blue wires are for the button, with no specific order required.
- After connecting the button, use M3 black flat-head screws to secure the lower part of the back plate to the aluminum bottom case.
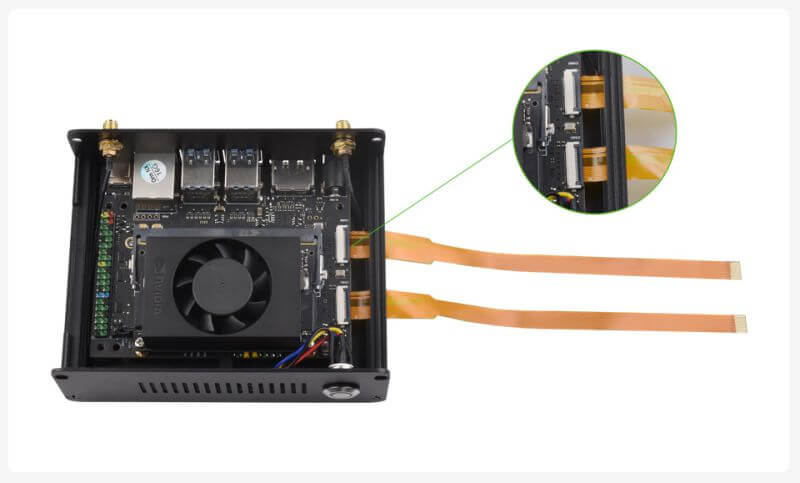
- If you need to connect a camera, thread the camera ribbon cable through the hole on the right side, securing it to the camera interface. Ensure that the metal contacts of the ribbon cable are facing downward.
- If you need to connect a camera, secure the camera holder bottom mount to the aluminum top case using M2.5 silver screws.
- If you need to connect a camera, use the provided nylon screw set to secure the camera to the camera holder top mount. Make sure to insert nylon pillars between the camera and the bracket to prevent the camera from short-circuiting.
- Please note that you should not use metal screws in this step. Using metal screws could lead to a short circuit with the camera, potentially damaging the equipment.
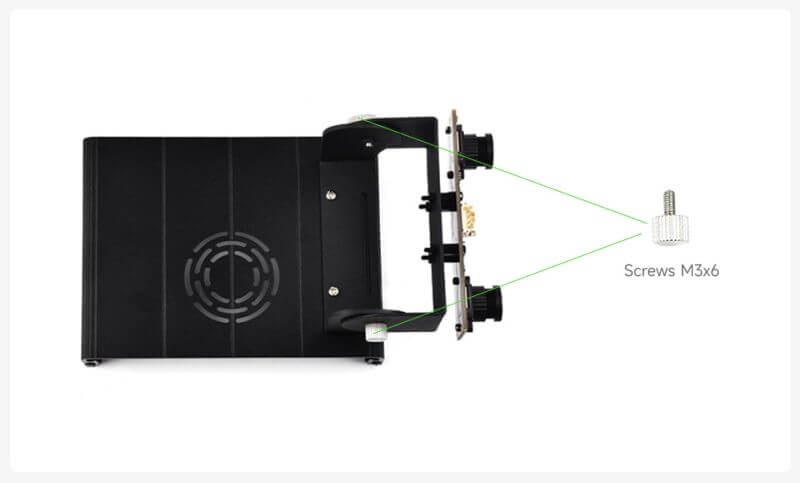
- Fix the camera holder top mount onto the camera holder bottom mount and tighten them together using M3 screws. During use, users can loosen the screws to adjust the bracket's angle as needed.
- Install the aluminum top case onto the bottom case, ensuring the correct orientation. Then, use M3 black flat-head screws to securely fasten the upper side of the side panels. Connect the other end of the camera ribbon cable to the camera, and attach the antenna.
- Finally, users in need can apply non-slip rubber pads to the bottom.




TAG:
Raspberry Pi 5 CR2032
ESP32 S3
Digital Input
Raspberry Pi LCD
CSI Camera
X1200 Raspberry Pi 5 UPS Board Uninterruptible Power Supply For 18650-Li-Battery (NOT includ)
Raspberry Pi 5 PCIe to 4 Port 2.5G Gigabit Ethernet Adapter RJ45 Ports
Raspberry Pi Triple LCD HAT
RS232 to CAN
ESP32-S3 LCD
Raspberry Pi 21.5inch FHD LCD 1080x1920 Capacitive TouchScreen Display For Raspberry Pi/Jetson Nano/
Raspberry Pi 10.1 inch DSI LCD TouchScreen Display 800x1280 Also For RK3576/RK3506/ESP32-P4
TVBOX Kit Luckfox Pico Ultra And 4inch LCD RGB Captive TouchScreen Display
Raspberry Pi 0.96inch RGB OLED
ESP32-P4-WIFI6 5inch LCD Display AI Development Board 720×1280 5 inch TouchScreen Deepseek
Raspberry Pi Pico 2 P2350-Plus Smart Car Kit PicoGo2 Autonomous Driving Learning Car
Raspberry Pi 5 UPS HAT E 4-Port For 21700-Li-Battery (NOT includ) 5V6A Uninterruptible Power Supply
SpotPear
Arduino MLX90640
PCIe M.2 NVMe Dual SSD

.jpg){kind=link}
TAG:
LuckFox Pico
ESP32 C3
BBC Microbit programmable gamepad for Micro:bit
Monitor
T1 ESP-32 V1.0
ESP32 C3 MINI TV
RP2040
Milk V Duo Module 01 Evaluation Board SG2000 512MB RISC-V Duo S
Xbox/PS4/Switch
ESP32 S3 2 inch LCD Display Camera
Raspberry Pi 5 POE Power over Ethernet PCIe to M.2 NVMe SSD Board HAT+
CPU Monitor Screen
Raspberry Pi 5 PCIe to SSD
Module
Raspberry Pi CM5 to Pi 5 Expansion Board With USB microphone & Audio Port
ESP32-C6
Raspberry Pi Triple Screen HAT
Raspberry Pi 21.5inch FHD LCD 1080x1920 Capacitive TouchScreen Display
4inch 480x480 LCD Captive TouchScreen Display Luckfox Pico Ultra
Pi5 Active Cooler