



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
Raspberry Pi Pico-CAN-B User Guide
Introduction
This is a CAN module designed for Raspberry Pi Pico, enabling Pico to achieve reliable long-distance communication.
Features
- Standard Raspberry Pi Pico header, supports Raspberry Pi Pico series boards.
- Features CAN function, adopts SPI interface CAN controller MCP2515 with transceiver SIT65HVD230DR.
- Comes with online development resources and manual (Raspberry Pi Pico C/C++ and MicroPython examples).
Specifications
- Operating voltage: 3.3V~5V
- CAN controller: MCP2515
- Control interface: SPI
- CAN transceiver: SIT65HVD230DR
- Baudrate: 5K~1000Kbps
- Dimensions: 52 x 21mm
Pinout Definition

Dimensions

Pico User Guide
Hardware Connection
Please take care of the direction when you connect Pico, a USB port is printed to indicate. You can also check the pin of Pico and the module when connecting.
Demo Download
1. Directly download it on the Raspberry Pi: Open the Raspberry Pi and execute:
sudo apt-get install p7zip-full cd ~ sudo wget https://www.waveshare.com/w/upload/8/8a/Pico-CAN-B-Code.7z 7z Pico_Pico-CAN-B-Code.7z -o./Pico-CAN-B-Code.7z cd ~/Pico-CAN-B-Code
2. Also, you can download the demo under the #Resource.
How to Use the Demo
Python
- 1. Press and hold the BOOTSET button on the Pico board, connect the pico to the USB port of the computer through the Micro USB cable, and release the button after the computer recognizes a removable hard disk (RPI-RP2).
- 2. Copy the pico_micropython_xxxxx.uf2 file in the python directory to the recognized removable disk (RPI-RP2).
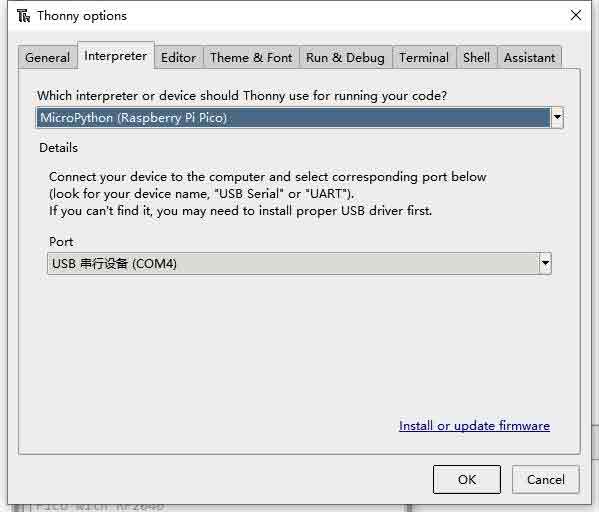
- 3. Open Thonny IDE (Note: Use the latest version of Thonny, otherwise there is no Pico support package, the latest version under Windows is v3.3.3).
- 4. Click Tools -> Settings -> Interpreter, and select Pico and the corresponding port as shown in the figure.
- 5. File -> Open -> MCP2512.py file, click to run, as shown in the following figure:

This is a transceiver demo, connect to another CAN device (A-A B-B connection), configure the frame ID 0x123, and then send 1-8 in turn.
Resource
Document
Demo
Development Software
Download Firmware
- Download MicroPython Firmware:

- Download C_Blink Firmware:

Open-source Demo
TAG:
Raspberry Pi Pico 1.54inch LCD display 240×240 IPS 1.54 inch screen
Pi5 Fan
Raspberry Pi 5 PCIe to M.2
GC2083
Raspberry Pi UGV Rover ROS2 PT AI OpenCV Robot Car MediaPipe
UGV Rover PT Kit AI OpenCV Robot Car MediaPipe For Jetson Orin
Raspberry Pi Thermal imaging camera
R7FA4 Plus A Board Based on R7FA4M1AB3CFM Compatible with Arduino UNO For R4 Minima
luckfox-pico-ultra-w-WIFI-Bluetooth
Raspberry Pi Pico 2 RP2350 Pico2 ARM Cortex-M33 And RISC-V Hazard3 520KByte 4MByte QSPI Flash
Raspberry Pi Pico
Raspberry Pi 5 IMX219
Pi5 Power
IMX477 IR CUT Camera (A) 12.3MP For Jetson Nano/Orin And Raspberry Pi
Raspberry Pi 5 PCIe to M.2 NVMe SSD Adapter Board HAT Pi5-PCIe-MPS2242-2230-Board
2.15 inch e-Paper HAT+ B E-Ink Red/Black/White 296×160 Screen Display For Arduino /Raspberry Pi /Jetson Nano /STM32
SIM7600G H Mini PCIe SIMCom Original 4G LTE Cat-4 Module Global Coverage GNSS
Raspberry Pi CM5 Gigabit/2.5G Dual Ethernet Expansion Board with RJ45 GPIO IO Base
DeepSeek ESP32-S3 Voice Chat Robot espHome XiaoZhi Ball
ESP32-C6

TAG:
T-QTC6 ESP32-C6 0.85 inch LCD Development Board 0.85inch TouchScreen
4inch LCD IPS Captive TouchScreen 720×720 Display Luckfox Pico
Raspberry Pi HQ High Quality Camera 12.3MP IMX477 Sensor M12 Lenses
Raspberry Pi Starlight Camera IR-CUT IMX462
DTM3202
2.9 inch Passive NFC e-Paper ink (G) RYBW Display Screen No Need Battery Wireless Power & Data Transfer
Raspberry Pi 5 PCIe USB HUB 3.2 Gen1 HAT+ High Speed Pi5
Gyroscope Sensor
Raspberry Pi 4/4.3 inch DSI MIPI LCD TouchScreen Display 4/4.3inch 480x800 For Luckfox Lyra RK3506/ESP32-P4/Luckfox Omni3576
Raspberry Pi 10.85 inch e-Paper ink screen display black white 1360×480 For Arduino /Jetson /STM32 /ESP32
ESP32 LVGL
Raspberry Pi 5
Raspberry Pi 5 Aluminum Case
Active Cooler
Arduino UNO R4 WiFi
Jetson Nano
Xbox/PS4/Switch
Raspberry Pi 5 8 inch DSI LCD Captive TouchScreen MIPI Display 1280x800
Raspberry Pi 5 PCIe M.2 5G 4G 3G RM520N-GL
Sipeed Lichee Tang Nano 9K FPGA GW1NR-9 GOAI Gowin