



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
Raspberry-Pi-AI-HAT+ User Guide
Overview
Introduction
Hailo-8/8L chip with 26/13Tops computing power
Features
- A neural network inference accelerator built with 13/26 trillion operations per second (TOPS) built on the Hailo-8/8L chip
- High-performance AI expansion board for Raspberry Pi 5
- Installed with hardware kit
- Stacked GPIO headers
Hardware connection
Pay attention to the direction of the cable, and the connection is shown in the figure: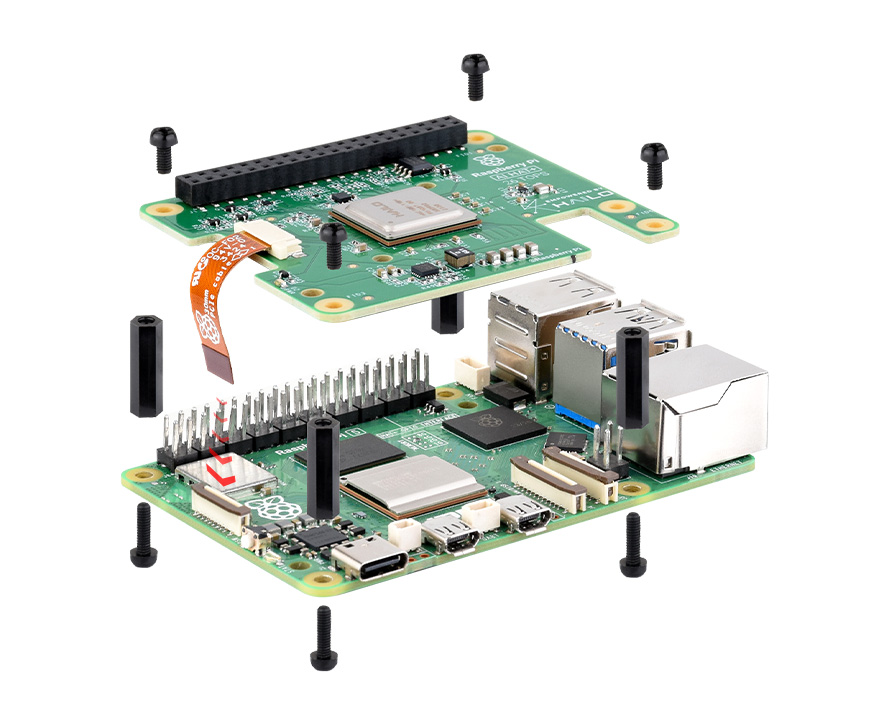
Working with Raspberry Pi
Update
#1. Update the software sudo apt update && sudo apt full-upgrade sudo rpi-eeprom-update #Configure CLI (not required for systems 24 years or later) sudo raspi-config #Under Advanced Options> Bootloader Version, select Latest. Then use the Finish or Esc key to exit raspi-config. #2. Update the firmware sudo rpi-eeprom-update -a
Identify the device
1. Enable PCIE interface
Connect the hardware, the latest system will have hardware detection, connecting the hardware will automatically enable PCIE If it defaults to not having the PCIE interface enabled, execute: add "dtparam=pciex1" to /boot/firmware/config.txt
2. Enable PCIE Gen3, then add following to /boot/firmware/config.txt (Gne3 mode must be started):
dtparam=pciex1_gen=3
3. Restart PI5 after modification, and it will then identify the device. (You can choose not to restart immediately, instead waiting to restart after installing the library)

Test the demo
rpicam-apps uses the Hailo AI neural network accelerator to run camera demo
Preparation:
1. Raspberry Pi 5 and Hailo-8 Acce A kit 2. Install 64-bit Raspberry Pi OS Bookworm 3. Install the Raspberry Pi camera (test using Raspberry_Pi_Camera _Module_3 to connect to CAM1 interface)
1. Install the required dependencies for using the AI Kit
sudo apt install hailo-all
2. Restart the device
sudo reboot
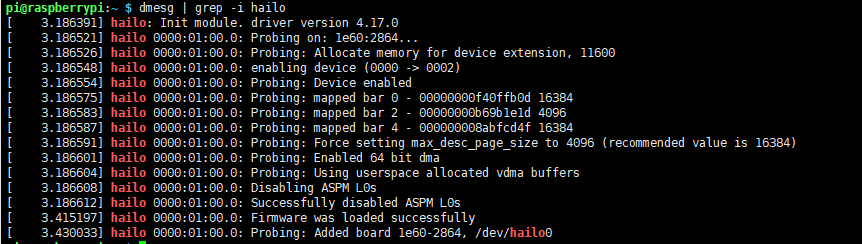
3. Check if the driver is working properly
hailortcli fw-control identifyYou can also execute dmesg | grep -i hailo to check the log
4. Check the camera
rpicam-hello -t 10s Please make sure that the camera is working properly
5. Clone the repository rpicam-apps
git clone --depth 1 https://github.com/raspberrypi/rpicam-apps.git ~/rpicam-apps
6. Test
Object detection rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolov6_inference.json --lores-width 640 --lores-height 640 Yolov8 model rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolov8_inference.json --lores-width 640 --lores-height 640 YoloX model rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolox_inference.json --lores-width 640 --lores-height 640 Yolov5 character and face model rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolov5_personface.json --lores-width 640 --lores-height 640 Image segmentation rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolov5_segmentation.json --lores-width 640 --lores-height 640 --framerate 20 Pose estimation rpicam-hello -t 0 --post-process-file ~/rpicam-apps/assets/hailo_yolov8_pose.json --lores-width 640 --lores-height 640
If the above command prompts "ERROR: *** No such node (hef_file) ***" , execute the following
Object detection rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov6_inference.json --lores-width 640 --lores-height 640 Yolov8 model rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov8_inference.json --lores-width 640 --lores-height 640 YoloX model rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolox_inference.json --lores-width 640 --lores-height 640 Yolov5 character and face model rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov5_personface.json --lores-width 640 --lores-height 640 Image segmentation rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov5_segmentation.json --lores-width 640 --lores-height 640 --framerate 20 Pose estimation rpicam-hello -t 0 --post-process-file /usr/share/rpi-camera-assets/hailo_yolov8_pose.json --lores-width 640 --lores-height 640
For more information, please visit GitHub, Hailo official website
Support
Monday-Friday (9:30-6:30) Saturday (9:30-5:30)
Email: services01@spotpear.com
