



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
WAVEGO servo is assembled and calibrated properly
How do I know WAVEGO servo is assembled and calibrated properly
- Firstly, you need to understand how the servos work. The servos of WAVEGO can be controlled within 180 degrees, and do not need limit blocks as a result of its large torque. However, there is no way to confirm the angular position of the current servo output shaft by appearance as the round-copper gear output shaft can rotate continuously under the external force.
Due to the above reasons, before installing the servo rocker arm, it is necessary to use the driver board of the robot to control the servo to rotate to the middle position of its motion range (180°), and then install the servo rocker arm according to the specified angle. For the specific method and installation angle, please refer to the product WIKI assembly tutorial. The tutorial also includes the servo calibration method. The following describes how to determine whether the product is properly assembled and calibrated, which is convenient for quickly locating the problem.
- Assemble and calibrate the servo according to the tutorial.
- Turn on.
- Use your mobile phone to search for the WIFI hotspot name WAVESHARE Robot and enter the password 1234567890 to connect to the hotspot.
Generally. after the mobile phone is connected to the hotspot, it will prompt that it is not connected to the Internet due to the failure of Ping to the Internet server. The mobile phone may automatically disconnect the hotspot. After reconnecting the hotspot, it will not be automatically disconnected in the future.
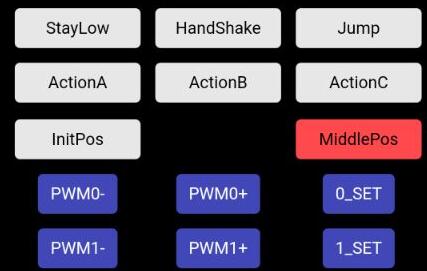
- Open the browser on the mobile phone (Google Chrome is recommended, other browsers may have button compatibility issues), and visit page 192.168.4.1.
- The content of the page is as follows. There are two buttons on the page: InitPos and MiddlePos. The former is the middle position of the servo angle during assembly (same as the assembly mode), and the latter is the position of the servo after calibration. After pressing the button, all servos will rotate to the corresponding angle.
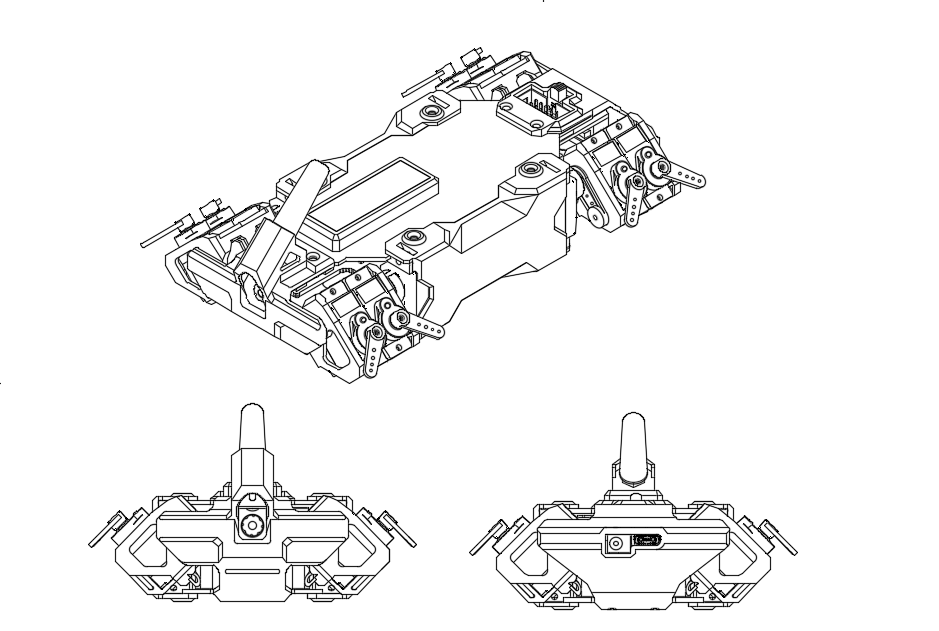
- After pressing the InitPos button, the servo swing angle is as follows. Due to the mechanical structure, an error within ±10° is allowed here (for this reason, the servo needs to be calibrated). If the error is too large, you need to re-install the corresponding servo rocker arm according to the assembly tutorial.
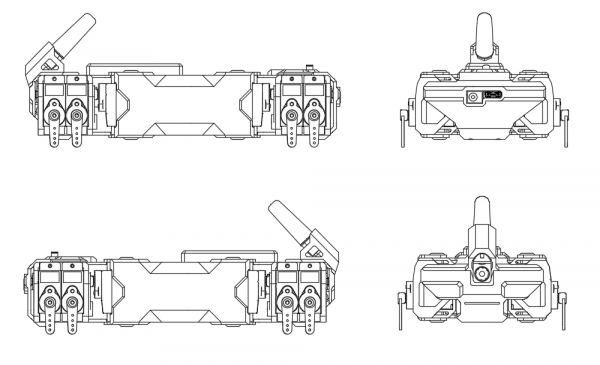
- After pressing the MiddlePos button, the servo swing angle is as follows. Since this position is the position after software calibration, the error needs to be as small as possible. If the error is larger than the picture, the servo needs to be re-calibrated.
TAG:
ESP32-S3 Development Board 1.47 inch LCD 1.47B Display 1.47inch Screen SD 172×320 RGB LED
Raspberry Pi 64MP Camera
Lichee-Tang-Primer-20K-FPGA-Unboxing
Jetson Nano IO Board
STM32 0.85inch LCD
Raspberry Pi 5 Audio Card
ESP32 S3 AI 1.75 inch Development Board with 1.75inch AMOLED Touchscreen Round Screen Deepseek
RV1103
Modbus POE ETH Relay MQTT User Guide
Jetson Nano Fan
Raspberry Pi 5 PCIe to SATA Expansion Board with EEPROM HAT+
Raspberry Pi 5 PCIe to 4 Port 2.5G Gigabit Ethernet Adapter RJ45 Ports
Program
Raspberry Pi PICO Long-Range Communication
PC Secondary Screen
PI5 ABS Case
PI5
VGA to TTL
Raspberry Pi 5 PCIe TO Gigabit RJ45 ETH Adapter Board (C) Driver-Free RTL8111H For Pi5
Raspberry Pi 5 PCIe to M.2 5G/4G/3G HAT With RM520N-GL

TAG:
BG95 M3 Zero EVB QuecPython LTE EGPRS GNSS
ESP32
Integrated capacitive fingerprint module Cortex core UART serial port High-precision fingerprint recognition
ESP32-S3 GEEK
RP2040 LoRa-HF
Raspberry Pi 7 inch DSI LCD C Case A Display MIPI 1024x600 Capacitive TouchScreen
CV1800B
CAN Bus Breakout Board SeeedStudio-XIAO QTPy MCP2515 SN65HVD230
ESP32-S3 1.28inch Round LCD Display TouchScreen Accelerometer Gyroscope Sensor Case
ESP32 S3 Round 2.1 inch LCD Knob Rotary Display
ESP32-H2 Microcontroller Development Board
SpotPear
DeepSeek AI Voice Chat ESP32 C6 Development Board 2.06-inch AMOLED Display 410×502 2.06inch TouchScreen Programmable Watch
Raspberry Pi Triple Screen HAT
Computer USB Monitor Screen
LCC-14
Jetson Orin 4G/3G/2G expansion board GNSS GPS SIM7600G-H-M.2
Long Bar Screen
Industrial Modbus POE ETH Relay 30CH RTU Modbus TCP-Ethernet Digital Input PoE Power IOT
ESP32-S3