



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
RPi Tutorial Series: I2C Programming User Guide
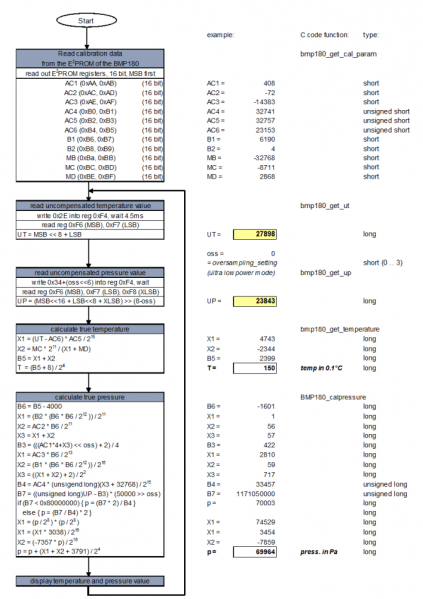
I believe you have a certain understanding about the I2C on RPi. Here We continue to control BMP180 via I2C. First the program reads calibration data (such as AC1, AC2, AC3, AC4, AC5, AC6, B1, B2, MB, MC and MD) from the EEPROM of the BMP180. Then reads uncompensated temperature value and pressure value and calculates the true value with the calibration data.
There are many libraries for Raspberry Pi I2C programming. We recommend BCM2835, WiringPi and smbus Python.
BMP180 Example
These examples require a certain library, see: Libraries Installation for RPi
in Python (import smbus)
Before using this program, you should install the smbus library for Python. Get it by apt-get command:
sudo apt-get install python-smbus
Save the following program and run with:
sudo python BMP180_example.py
This is a BMP180 driver written in Python.
Save the file as "BMP180.py"
import time
import smbus
# BMP085 default address.
BMP180_I2CADDR = 0x77
# Operating Modes
BMP180_ULTRALOWPOWER = 0
BMP180_STANDARD = 1
BMP180_HIGHRES = 2
BMP180_ULTRAHIGHRES = 3
# BMP085 Registers
BMP180_CAL_AC1 = 0xAA # R Calibration data (16 bits)
BMP180_CAL_AC2 = 0xAC # R Calibration data (16 bits)
BMP180_CAL_AC3 = 0xAE # R Calibration data (16 bits)
BMP180_CAL_AC4 = 0xB0 # R Calibration data (16 bits)
BMP180_CAL_AC5 = 0xB2 # R Calibration data (16 bits)
BMP180_CAL_AC6 = 0xB4 # R Calibration data (16 bits)
BMP180_CAL_B1 = 0xB6 # R Calibration data (16 bits)
BMP180_CAL_B2 = 0xB8 # R Calibration data (16 bits)
BMP180_CAL_MB = 0xBA # R Calibration data (16 bits)
BMP180_CAL_MC = 0xBC # R Calibration data (16 bits)
BMP180_CAL_MD = 0xBE # R Calibration data (16 bits)
BMP180_CONTROL = 0xF4
BMP180_TEMPDATA = 0xF6
BMP180_PRESSUREDATA = 0xF6
# Commands
BMP180_READTEMPCMD = 0x2E
BMP180_READPRESSURECMD = 0x34
class BMP180(object):
def __init__(self, address=BMP180_I2CADDR, mode=BMP180_STANDARD):
self._mode = mode
self._address = address
self._bus = smbus.SMBus(1)
# Load calibration values.
self._load_calibration()
def _read_byte(self,cmd):
return self._bus.read_byte_data(self._address,cmd)
def _read_u16(self,cmd):
MSB = self._bus.read_byte_data(self._address,cmd)
LSB = self._bus.read_byte_data(self._address,cmd+1)
return (MSB << 8) + LSB
def _read_s16(self,cmd):
result = self._read_u16(cmd)
if result > 32767:result -= 65536
return result
def _write_byte(self,cmd,val):
self._bus.write_byte_data(self._address,cmd,val)
def _load_calibration(self):
"load calibration"
self.cal_AC1 = self._read_s16(BMP180_CAL_AC1) # INT16
self.cal_AC2 = self._read_s16(BMP180_CAL_AC2) # INT16
self.cal_AC3 = self._read_s16(BMP180_CAL_AC3) # INT16
self.cal_AC4 = self._read_u16(BMP180_CAL_AC4) # UINT16
self.cal_AC5 = self._read_u16(BMP180_CAL_AC5) # UINT16
self.cal_AC6 = self._read_u16(BMP180_CAL_AC6) # UINT16
self.cal_B1 = self._read_s16(BMP180_CAL_B1) # INT16
self.cal_B2 = self._read_s16(BMP180_CAL_B2) # INT16
self.cal_MB = self._read_s16(BMP180_CAL_MB) # INT16
self.cal_MC = self._read_s16(BMP180_CAL_MC) # INT16
self.cal_MD = self._read_s16(BMP180_CAL_MD) # INT16
def read_raw_temp(self):
"""Reads the raw (uncompensated) temperature from the sensor."""
self._write_byte(BMP180_CONTROL, BMP180_READTEMPCMD)
time.sleep(0.005) # Wait 5ms
MSB = self._read_byte(BMP180_TEMPDATA)
LSB = self._read_byte(BMP180_TEMPDATA+1)
raw = (MSB << 8) + LSB
return raw
def read_raw_pressure(self):
"""Reads the raw (uncompensated) pressure level from the sensor."""
self._write_byte(BMP180_CONTROL, BMP180_READPRESSURECMD + (self._mode << 6))
if self._mode == BMP180_ULTRALOWPOWER:
time.sleep(0.005)
elif self._mode == BMP180_HIGHRES:
time.sleep(0.014)
elif self._mode == BMP180_ULTRAHIGHRES:
time.sleep(0.026)
else:
time.sleep(0.008)
MSB = self._read_byte(BMP180_PRESSUREDATA)
LSB = self._read_byte(BMP180_PRESSUREDATA+1)
XLSB = self._read_byte(BMP180_PRESSUREDATA+2)
raw = ((MSB << 16) + (LSB << 8) + XLSB) >> (8 - self._mode)
return raw
def read_temperature(self):
"""Gets the compensated temperature in degrees celsius."""
UT = self.read_raw_temp()
X1 = ((UT - self.cal_AC6) * self.cal_AC5) >> 15
X2 = (self.cal_MC << 11) / (X1 + self.cal_MD)
B5 = X1 + X2
temp = ((B5 + 8) >> 4) / 10.0
return temp
def read_pressure(self):
"""Gets the compensated pressure in Pascals."""
UT = self.read_raw_temp()
UP = self.read_raw_pressure()
X1 = ((UT - self.cal_AC6) * self.cal_AC5) >> 15
X2 = (self.cal_MC << 11) / (X1 + self.cal_MD)
B5 = X1 + X2
# Pressure Calculations
B6 = B5 - 4000
X1 = (self.cal_B2 * (B6 * B6) >> 12) >> 11
X2 = (self.cal_AC2 * B6) >> 11
X3 = X1 + X2
B3 = (((self.cal_AC1 * 4 + X3) << self._mode) + 2) / 4
X1 = (self.cal_AC3 * B6) >> 13
X2 = (self.cal_B1 * ((B6 * B6) >> 12)) >> 16
X3 = ((X1 + X2) + 2) >> 2
B4 = (self.cal_AC4 * (X3 + 32768)) >> 15
B7 = (UP - B3) * (50000 >> self._mode)
if B7 < 0x80000000:
p = (B7 * 2) / B4
else:
p = (B7 / B4) * 2
X1 = (p >> 8) * (p >> 8)
X1 = (X1 * 3038) >> 16
X2 = (-7357 * p) >> 16
p = p + ((X1 + X2 + 3791) >> 4)
return p
def read_altitude(self, sealevel_pa=101325.0):
"""Calculates the altitude in meters."""
# Calculation taken straight from section 3.6 of the datasheet.
pressure = float(self.read_pressure())
altitude = 44330.0 * (1.0 - pow(pressure / sealevel_pa, (1.0/5.255)))
return altitude
def read_sealevel_pressure(self, altitude_m=0.0):
"""Calculates the pressure at sealevel when given a known altitude in
meters. Returns a value in Pascals."""
pressure = float(self.read_pressure())
p0 = pressure / pow(1.0 - altitude_m/44330.0, 5.255)
return p0
This is an example working with the BMP180 driver (written in Python).Save the file as "BMP180_example.py"
#!/usr/bin/python
import time
from BMP180 import BMP180
# Initialise the BMP085 and use STANDARD mode (default value)
# bmp = BMP085(0x77, debug=True)
bmp = BMP180()
# To specify a different operating mode, uncomment one of the following:
# bmp = BMP085(0x77, 0) # ULTRALOWPOWER Mode
# bmp = BMP085(0x77, 1) # STANDARD Mode
# bmp = BMP085(0x77, 2) # HIRES Mode
# bmp = BMP085(0x77, 3) # ULTRAHIRES Mode
while True:
temp = bmp.read_temperature()
# Read the current barometric pressure level
pressure = bmp.read_pressure()
# To calculate altitude based on an estimated mean sea level pressure
# (1013.25 hPa) call the function as follows, but this won't be very accurate
altitude = bmp.read_altitude()
# To specify a more accurate altitude, enter the correct mean sea level
# pressure level. For example, if the current pressure level is 1023.50 hPa
# enter 102350 since we include two decimal places in the integer value
# altitude = bmp.readAltitude(102350)
print "Temperature: %.2f C" % temp
print "Pressure: %.2f hPa" % (pressure / 100.0)
print "Altitude: %.2f\n" % altitude
time.sleep(1)
in C (include bcm2835.h)
You can compile the C program with:
gcc -Wall bmp180.c -o bmp180 -lbcm2835 -lm
and run with:
sudo ./bmp180
This is a BMP180 example written with bcm2835.h
Save the file as "bmp180.c"
#include <bcm2835.h>
#include <stdio.h>
#include <math.h>
#include "bmp180.h"
#define OSS BMP180_STANDARD
short AC1,AC2,AC3,B1,B2,MB,MC,MD;
unsigned short AC4,AC5,AC6;
char I2C_readByte(char reg)
{
char buf[] = {reg};
bcm2835_i2c_read_register_rs(buf,buf,1);
return buf[0];
}
unsigned short I2C_readU16(char reg)
{
char buf[] = {reg,0};
bcm2835_i2c_read_register_rs(buf,buf,2);
int value = buf[0]*0x100+buf[1];
return value;
}
short I2C_readS16(char reg)
{
int result;
result = I2C_readU16(reg);
if (result > 32767)result -= 65536;
return (short)result;
}
void I2C_writeByte(char reg,char val)
{
char buf[] = {reg,val};
bcm2835_i2c_write(buf,2);
}
void load_calibration()
{
AC1 = I2C_readS16(BMP180_CAL_AC1);
AC2 = I2C_readS16(BMP180_CAL_AC2);
AC3 = I2C_readS16(BMP180_CAL_AC3);
AC4 = I2C_readU16(BMP180_CAL_AC4);
AC5 = I2C_readU16(BMP180_CAL_AC5);
AC6 = I2C_readU16(BMP180_CAL_AC6);
B1 = I2C_readS16(BMP180_CAL_B1);
B2 = I2C_readS16(BMP180_CAL_B2);
MB = I2C_readS16(BMP180_CAL_MB);
MC = I2C_readS16(BMP180_CAL_MC);
MD = I2C_readS16(BMP180_CAL_MD);
}
int read_raw_temp()
{
int raw;
I2C_writeByte(BMP180_CONTROL,BMP180_READTEMPCMD);
bcm2835_delay(5); //5ms
raw = I2C_readByte(BMP180_TEMPDATA) << 8;
raw += I2C_readByte(BMP180_TEMPDATA+1);
return raw;
}
int read_raw_pressure()
{
int MSB,LSB,XLSB,raw;
I2C_writeByte(BMP180_CONTROL,BMP180_READPRESSURECMD +(OSS << 6));
switch(OSS)
{
case BMP180_ULTRALOWPOWER:
bcm2835_delay(5);break;
case BMP180_HIGHRES:
bcm2835_delay(14);break;
case BMP180_ULTRAHIGHRES:
bcm2835_delay(26);break;
default :
bcm2835_delay(8);
}
MSB = I2C_readByte(BMP180_PRESSUREDATA);
LSB = I2C_readByte(BMP180_PRESSUREDATA + 1);
XLSB = I2C_readByte(BMP180_PRESSUREDATA + 2);
raw = ((MSB << 16) + (LSB << 8) + XLSB) >> (8 - OSS);
return raw;
}
float read_temperature()
{
float T;
int UT,X1,X2,B5;
UT = read_raw_temp();
X1 = ((UT - AC6)*AC5) >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
T = ((B5 + 8) >> 4) /10.0;
return T;
}
int read_pressure()
{
int P;
int UT,UP,X1,X2,X3,B3,B5,B6;
unsigned int B4;
int B7;
UT = read_raw_temp();
UP = read_raw_pressure();
X1 = ((UT - AC6)*AC5) >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
//Pressure Calculations
B6 = B5 - 4000;
X1 = (B2 * (B6 * B6) >> 12) >> 11;
X2 = (AC2 * B6) >> 11;
X3 = X1 + X2;
B3 = (((AC1 * 4 + X3) << OSS) + 2) / 4;
X1 = (AC3 * B6) >> 13;
X2 = (B1 * ((B6 * B6) >> 12)) >> 16;
X3 = ((X1 + X2) + 2) >> 2;
B4 = (AC4 * (X3 + 32768)) >> 15;
B7 = (UP - B3) * (50000 >> OSS);
if (B7 < 0x80000000){P = (B7 * 2) / B4;}
else {P = (B7 / B4) * 2;}
X1 = (P >> 8) * (P >> 8);
X1 = (X1 * 3038) >> 16;
X2 = (-7357 * P) >> 16;
P = P + ((X1 + X2 + 3791) >> 4);
return P;
}
float read_altitude()
{
float pressure,altitude;
float sealevel_pa = 101325.0;
pressure = (float)read_pressure();
altitude = 44330.0 * (1.0 - pow(pressure / sealevel_pa,(1.0/5.255)));
return altitude;
}
float read_sealevel_pressure()
{
float altitude_m = 0.0;
float pressure,p0;
pressure =(float)read_pressure();
p0 = pressure / pow(1.0 - altitude_m/44330.0,5.255);
return p0;
}
int main(int argc,char **argv)
{
printf("BMP180 Test Program ...\n");
if(!bcm2835_init()) return 1;
bcm2835_i2c_begin();
bcm2835_i2c_setSlaveAddress(BMP180_Address);
bcm2835_i2c_set_baudrate(10000);
load_calibration();
while(1)
{
printf("\nTemperature : %.2f C\n",read_temperature());
printf("Pressure : %.2f Pa\n",read_pressure()/100.0);
printf("Altitude : %.2f h\n",read_altitude());
bcm2835_delay(1000);
}
return 0;
}
The head file.
Save the file as "bmp180.h"
#ifndef _BMP180_ #define _BMP180_ //i2c address #define BMP180_Address 0x77 //Operating Modes #define BMP180_ULTRALOWPOWER 0 #define BMP180_STANDARD 1 #define BMP180_HIGHRES 2 #define BMP180_ULTRAHIGHRES 3 //BMP185 Registers #define BMP180_CAL_AC1 0xAA //Calibration data (16 bits) #define BMP180_CAL_AC2 0xAC //Calibration data (16 bits) #define BMP180_CAL_AC3 0xAE //Calibration data (16 bits) #define BMP180_CAL_AC4 0xB0 //Calibration data (16 bits) #define BMP180_CAL_AC5 0xB2 //Calibration data (16 bits) #define BMP180_CAL_AC6 0xB4 //Calibration data (16 bits) #define BMP180_CAL_B1 0xB6 //Calibration data (16 bits) #define BMP180_CAL_B2 0xB8 //Calibration data (16 bits) #define BMP180_CAL_MB 0xBA //Calibration data (16 bits) #define BMP180_CAL_MC 0xBC //Calibration data (16 bits) #define BMP180_CAL_MD 0xBE //Calibration data (16 bits) #define BMP180_CONTROL 0xF4 #define BMP180_TEMPDATA 0xF6 #define BMP180_PRESSUREDATA 0xF6 //Commands #define BMP180_READTEMPCMD 0x2E #define BMP180_READPRESSURECMD 0x34 #endif
in C (include wiringPi.h and wiringPiI2C.h)
You can compile the C program with:
gcc -Wall bmp180.c -o bmp180 -lwiringPi -lm
and run with:
sudo ./bmp180
This is a BMP180 example written with wiringPi.h and wiringPiI2C.h
Save the file as "bmp180.c"
#include <wiringPi.h>
#include <wiringPiI2C.h>
#include <stdio.h>
#include <math.h>
#include "bmp180.h"
#define OSS BMP180_STANDARD
short AC1,AC2,AC3,B1,B2,MB,MC,MD;
unsigned short AC4,AC5,AC6;
int fd;
char I2C_readByte(int reg)
{
return (char)wiringPiI2CReadReg8(fd,reg);
}
unsigned short I2C_readU16(int reg)
{
int MSB,LSB;
MSB = I2C_readByte(reg);
LSB = I2C_readByte(reg + 1);
int value = (MSB << 8) +LSB;
return (unsigned short)value;
}
short I2C_readS16(int reg)
{
int result;
result = I2C_readU16(reg);
if (result > 32767)result -= 65536;
return (short)result;
}
void I2C_writeByte(int reg,int val)
{
wiringPiI2CWriteReg8(fd,reg,val);
}
void load_calibration()
{
AC1 = I2C_readS16(BMP180_CAL_AC1);
AC2 = I2C_readS16(BMP180_CAL_AC2);
AC3 = I2C_readS16(BMP180_CAL_AC3);
AC4 = I2C_readU16(BMP180_CAL_AC4);
AC5 = I2C_readU16(BMP180_CAL_AC5);
AC6 = I2C_readU16(BMP180_CAL_AC6);
B1 = I2C_readS16(BMP180_CAL_B1);
B2 = I2C_readS16(BMP180_CAL_B2);
MB = I2C_readS16(BMP180_CAL_MB);
MC = I2C_readS16(BMP180_CAL_MC);
MD = I2C_readS16(BMP180_CAL_MD);
}
int read_raw_temp()
{
int raw;
I2C_writeByte(BMP180_CONTROL,BMP180_READTEMPCMD);
delay(5); //5ms;
raw = I2C_readByte(BMP180_TEMPDATA) << 8;
raw += I2C_readByte(BMP180_TEMPDATA+1);
return raw;
}
int read_raw_pressure()
{
int MSB,LSB,XLSB,raw;
I2C_writeByte(BMP180_CONTROL,BMP180_READPRESSURECMD +(OSS << 6));
switch(OSS)
{
case BMP180_ULTRALOWPOWER:
delay(5);break;
case BMP180_HIGHRES:
delay(14);break;
case BMP180_ULTRAHIGHRES:
delay(26);break;
default :
delay(8);
}
MSB = I2C_readByte(BMP180_PRESSUREDATA);
LSB = I2C_readByte(BMP180_PRESSUREDATA + 1);
XLSB = I2C_readByte(BMP180_PRESSUREDATA + 2);
raw = ((MSB << 16) + (LSB << 8) + XLSB) >> (8 - OSS);
return raw;
}
float read_temperature()
{
float T;
int UT,X1,X2,B5;
UT = read_raw_temp();
X1 = ((UT - AC6)*AC5) >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
T = ((B5 + 8) >> 4) /10.0;
return T;
}
int read_pressure()
{
int P;
int UT,UP,X1,X2,X3,B3,B5,B6;
unsigned int B4;
int B7;
UT = read_raw_temp();
UP = read_raw_pressure();
X1 = ((UT - AC6)*AC5) >> 15;
X2 = (MC << 11) / (X1 + MD);
B5 = X1 + X2;
//Pressure Calculations
B6 = B5 - 4000;
X1 = (B2 * (B6 * B6) >> 12) >> 11;
X2 = (AC2 * B6) >> 11;
X3 = X1 + X2;
B3 = (((AC1 * 4 + X3) << OSS) + 2) / 4;
X1 = (AC3 * B6) >> 13;
X2 = (B1 * ((B6 * B6) >> 12)) >> 16;
X3 = ((X1 + X2) + 2) >> 2;
B4 = (AC4 * (X3 + 32768)) >> 15;
B7 = (UP - B3) * (50000 >> OSS);
if (B7 < 0x80000000){P = (B7 * 2) / B4;}
else {P = (B7 / B4) * 2;}
X1 = (P >> 8) * (P >> 8);
X1 = (X1 * 3038) >> 16;
X2 = (-7357 * P) >> 16;
P = P + ((X1 + X2 + 3791) >> 4);
return P;
}
float read_altitude()
{
float pressure,altitude;
float sealevel_pa = 101325.0;
pressure = (float)read_pressure();
altitude = 44330.0 * (1.0 - pow(pressure / sealevel_pa,(1.0/5.255)));
return altitude;
}
float read_sealevel_pressure()
{
float altitude_m = 0.0;
float pressure,p0;
pressure =(float)read_pressure();
p0 = pressure / pow(1.0 - altitude_m/44330.0,5.255);
return p0;
}
int main(int argc,char **argv)
{
printf("BMP180 Test Program ...\n");
if(wiringPiSetup() < 0) return 1;
fd = wiringPiI2CSetup(BMP180_Address);
load_calibration();
while(1)
{
printf("\nTemperature : %.2f C\n",read_temperature());
printf("Pressure : %.2f Pa\n",read_pressure()/100.0);
printf("Altitude : %.2f h\n",read_altitude());
delay(1000);
}
return 0;
}
The head file.
Save the file as "bmp180.h"
#ifndef _BMP180_ #define _BMP180_ //i2c address #define BMP180_Address 0x77 //Operating Modes #define BMP180_ULTRALOWPOWER 0 #define BMP180_STANDARD 1 #define BMP180_HIGHRES 2 #define BMP180_ULTRAHIGHRES 3 //BMP185 Registers #define BMP180_CAL_AC1 0xAA //Calibration data (16 bits) #define BMP180_CAL_AC2 0xAC //Calibration data (16 bits) #define BMP180_CAL_AC3 0xAE //Calibration data (16 bits) #define BMP180_CAL_AC4 0xB0 //Calibration data (16 bits) #define BMP180_CAL_AC5 0xB2 //Calibration data (16 bits) #define BMP180_CAL_AC6 0xB4 //Calibration data (16 bits) #define BMP180_CAL_B1 0xB6 //Calibration data (16 bits) #define BMP180_CAL_B2 0xB8 //Calibration data (16 bits) #define BMP180_CAL_MB 0xBA //Calibration data (16 bits) #define BMP180_CAL_MC 0xBC //Calibration data (16 bits) #define BMP180_CAL_MD 0xBE //Calibration data (16 bits) #define BMP180_CONTROL 0xF4 #define BMP180_TEMPDATA 0xF6 #define BMP180_PRESSUREDATA 0xF6 //Commands #define BMP180_READTEMPCMD 0x2E #define BMP180_READPRESSURECMD 0x34 #endif
