



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Common Moudle
- >
- ESP
T-Touch Bar User Guide
【Quick start】
USE Arduino IDE
- Install the current upstream Arduino IDE at the 1.8 level or later. The current version is at the Arduino website.
- Start Arduino and open Preferences window. In additional board manager add url: https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json .separating them with commas.
- Select Tools -> Board Management -> Search for ESP32 and install
- Select Tools -> Board -> ESP32S3 Dev Module
- Copy the files in the "lib" directory to the "~Arduino/libraries" directory
USE PlatformIO
- InstallVSCODEandPython
- Search for the PlatformIO plug-in in the VSCODE extension and install it.
- After the installation is complete and the reload is completed, there will be a small house icon in the lower left corner. Click to display the Platformio IDE home page
- Go to file - > Open folder - > Select the T-Touch_Bar folder and click the (√) symbol in the lower left corner to compile (→) for upload.
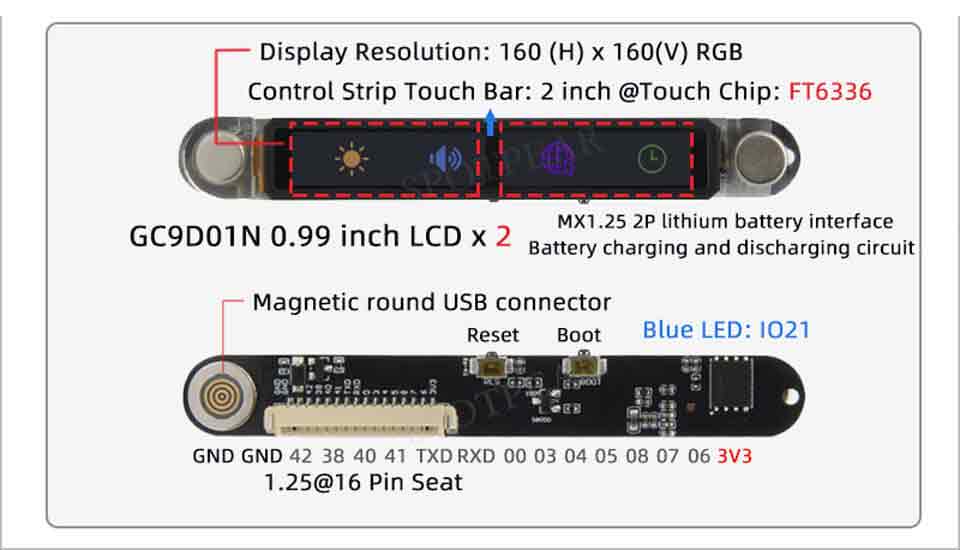
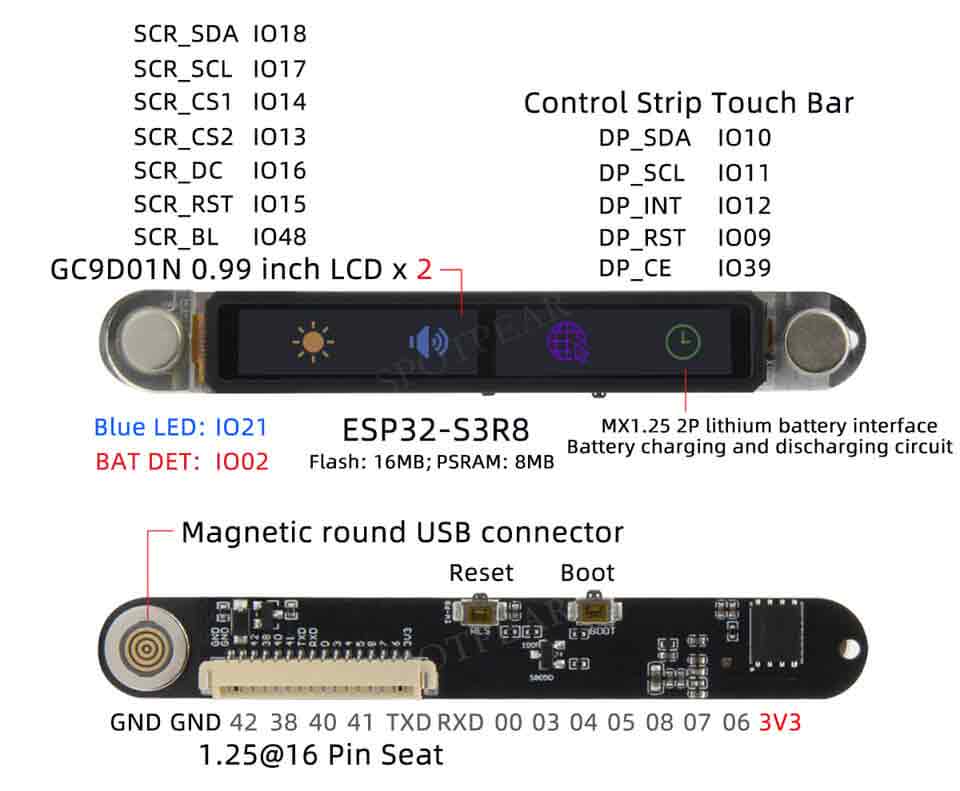
Pinout
Battery life
Current consumption from 3.7 Volt battery:
| Mode | Average current |
|---|---|
| Active | 60 mA |
| Sleep | 0.3 mA |
TAG:
Raspberry Pi 3.5 inch e-Paper link (G) RYBW 384x184 For Arduino / Jetson Nano / STM32
2.8inch Round LCD USB Monitor Computer Monitor Display Screen USB Type C Secondary Screen PC CPU GPU
Raspberry Pi Camera Module 3 Sensor Assembly IMX708 Official Original 11.9MP Camera
UART To CAN Mini
E-Paper
Writing-Image User Guide
Jetson Nano Case
Raspberry Pi 1.54inch OLED
Finger Vein Scanner Module (A) Cortex M4F UART 3.3V TTL UL94-5VB IP56 Better Than Fingerprint Recognition
RP2040
Raspberry Pi Auto Focus 12MP IMX708 Camera High Resolution
Raspberry Pi User Guide
ESP32-P4-WIFI6 5inch LCD Display AI Development Board 720×1280 5 inch TouchScreen Deepseek
4.26inch
Digital Photo Frames
RP2040 LoRa-HF
ESP32 S3 Development Board 1.5 inch Round Rotary OLED TouchScreen Smart Knob Display 1.5inch Display 466x466 LVGL for Arduino
Raspberry Pi 5 DSI Bookworm
Industrial Modbus POE ETH RJ45 To 8-Ch Relay B RTU/Modbus TCP-Ethernet For IOT
Raspberry Pi Starlight Camera IR-CUT IMX462 (A) Sensor 2MP 90 Degree

TAG:
PCIE
DeepSeek ESP32-S3 Voice Chat Robot
Raspberry Pi
ESP32 LVGL
Sipeed Lichee Tang Nano 4K FPGA W1NSR-LV4C GOAI Gowin
Raspberry Pi 5 Rainbow Acrylic Case Colorful Translucent Acrylic Case Supports Installing Official Active Cooler
Raspberry Pi 5 PCIe M.2 NVMe SSD
6mm Wide Angle CS Lens Raspberry Pi High Quality Camera CS Global Shutter Camera
Arduino UNO R4 Minima
Arduino 1.54inch OLED
Raspberry Pi 16-inch Type-C/HDMI 2K TouchScreen 2560×1600 16inch 165Hz computer
Arduino IR Thermal Imaging Camera
Milk-V Duo Ethernet
0.85 inch Screen
D-Robotics RDK S100 Camera Expansion Board MIPI + GMSL Interface
RP2040-Keyboard-3
Raspberry Pi 5 PCIe M.2 NVMe SSD Pi5 2280-2242-2230-Board-C
Sipeed FPGA Tang Primer 20K Dock Lite 128M DDR3 GW2A-LV18PG256C8/I7
Raspberry Pi DSI LCD
Raspberry Pi Pico HM01B0