



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Common Moudle
- >
- Sensors
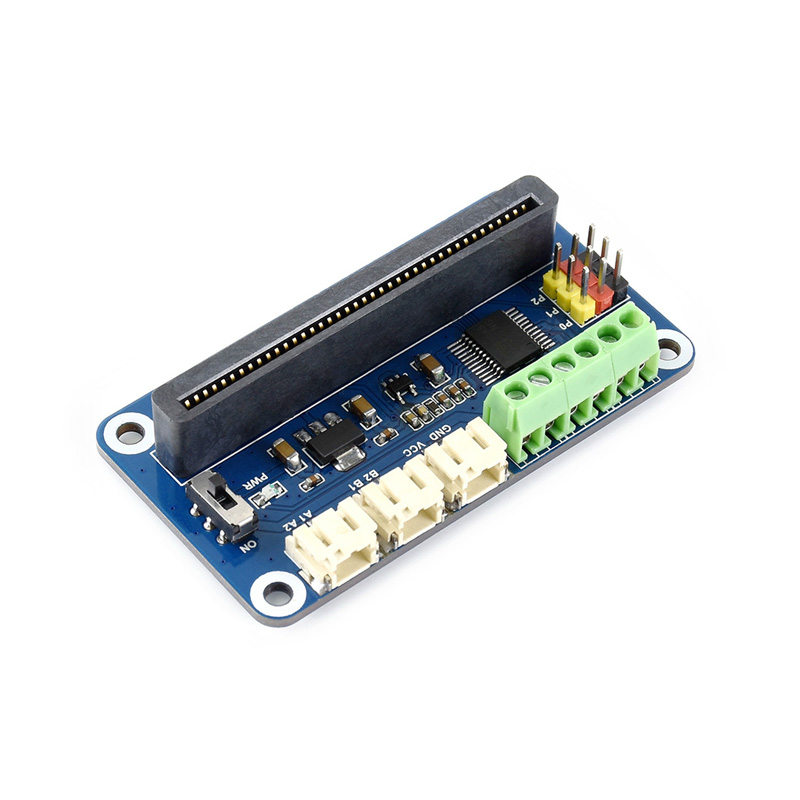
Motor Driver for micro:bit User Guide
Introduction
This is a motor driver module designed for the BBC micro:bit. Can drive 2 DC motots and 3 steering gears
Features
- micro:bit edge connector, directly pluggable
- Onboard connectors for two DC motors and three steering gears
- 5V regulator, supports 6V~12V input (VIN terminal). Output current up to 3A
- Onboard connectors for DC motor and standard steering gear.
- Comes with developing resources and munual
Specification
- Power input range:6V~12V
- Gear voltage: 5V
- Logic voltage: 3.3V
- Driver: TB6612FNG
- Dimension: 65mm x 36mm
- Holes size: 3.0mm
Pinouts
| PIN | Description |
|---|---|
| Vcc | Power (6~12V) |
| GND | Ground |
| A1 | positive pole of motor A |
| A2 | negative pole of motor A |
| B1 | positive pole of motor B |
| B2 | negative pole of motor B |
| P0 | control pin P0 of steering gear |
| P1 | control pin P1 of steering gear |
| P2 | control pin P2 of steering gear |
Programming Guide
Micor:bit has variety of programming methods like mbed, micropython, typescript and other programming methods, as well as code online websites which are abundant.
The official recommendation are two programming methods: typescript and micropython. Typescript is the graphical programming language.
Typescript
Typescript is a kind of graphical programming, its website is that: https://makecode.microbit.org/#
- Open a browser and input the next URL
- Add Packeage
You can clone the package of Motor Driver HAT for micro;bit from github. Click More..->Add Package, then copy the URL to the Edittext. https://github.com/waveshare/pxt-Motor
Control Motor Rotation
Control two motors at the same time, and set their rotating direction and speed
Stop motor when button A is pressed
Control Servo
Control servo to rotate in certain angle.
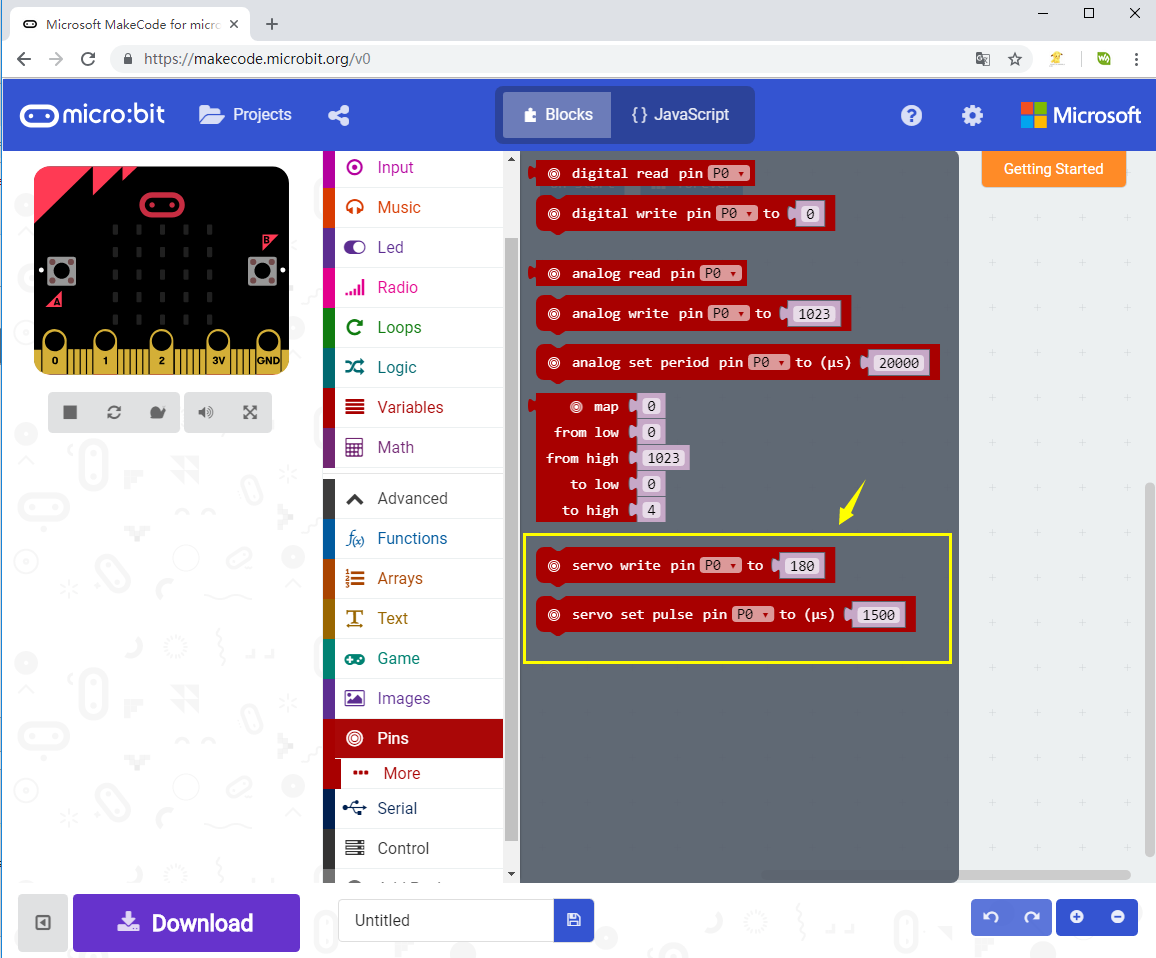
Other blocks
There are also some block in Avandced->More which can be used to control servo
Python
You can get more information about python programming of micro:bit on this web page: https://microbit-micropython.readthedocs.io/en/latest/index.html
We provide python codes for this moudle, you can download and have a try.
Upzip the demo code you download and open the file motor.py which is under python directory with software mu.
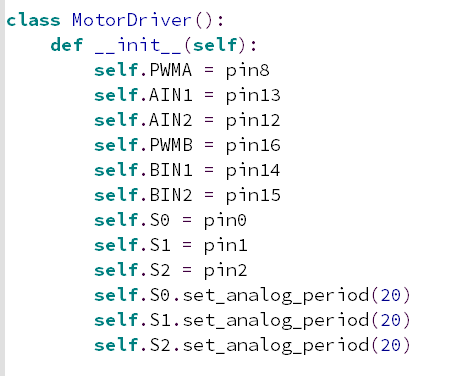
Initiailing
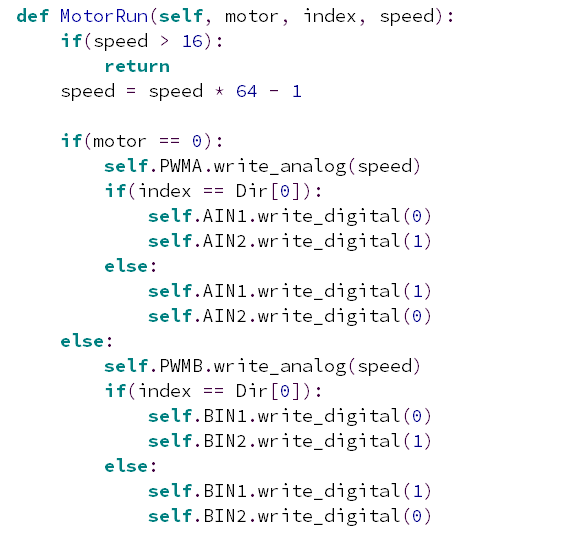
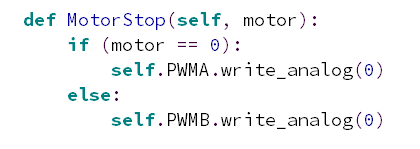
Control Motor
Stop
Cotnrol Servo
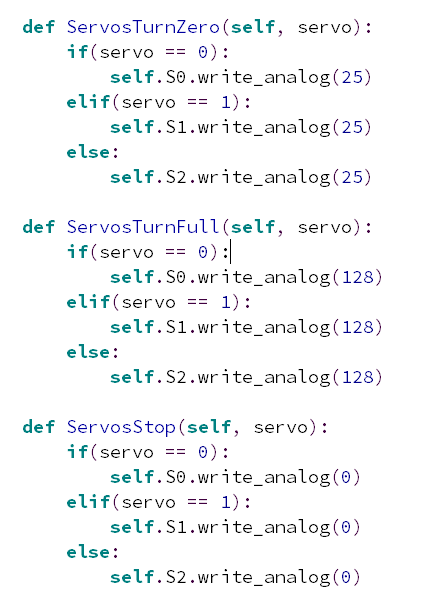
Control servo to rotate in certian angle
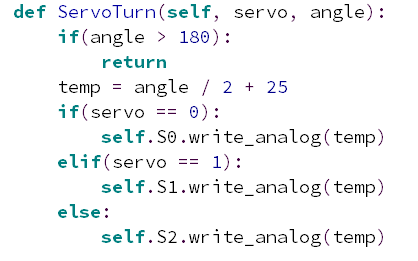
Temp=angle/2+25 is duty ratio, its range is 0~1023.
Example:
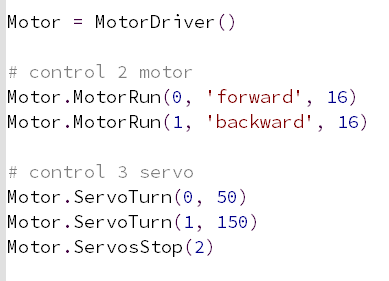
Motor1 moves forward, Motor2 moves backward, servo1 rotate 50 degree, servo2 rotate 150 degree.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}