



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
CM5-IO-BASE-A User Guide
Overview
| ||

Introduction
As the IO board of the Raspberry Pi Compute Module 5, CM5-IO-BASE-A is a baseboard that can be used with the Raspberry Pi Compute Module 5. With powerful features are integrated into a compact design, it is only the size of a bank card. It comes with two USB3.2 Gen1 ports and two USB2.0 ports onboard, making it convenient for users.
Features and Precautions
1. Do not plug or unplug any device other than USB and HDMI when the device is powered on
2. Type C can be used as a USB SLAVE interface to flash images.
3. Onboard default 2 USB 3.2 Gen1 ports
4. When you need to use POE, connect the POE jumper cap to the EN position
5. Supports 4 screens to display different contents, adds MIPI DSI driver, regardless of whether a screen is connected, the system will default to connect, the screen will display in split-screen mode (related to the system version)
6. The onboard BOOT button, you can press the BOOT button before powering on, and connect to the computer through Type C to let the device enter the flashing mode
7. Do not connect other devices when using Type C to flash. Insufficient power supply for flashing will cause the device to be unrecognized
8. The USB ports have a total maximum power output of 2A
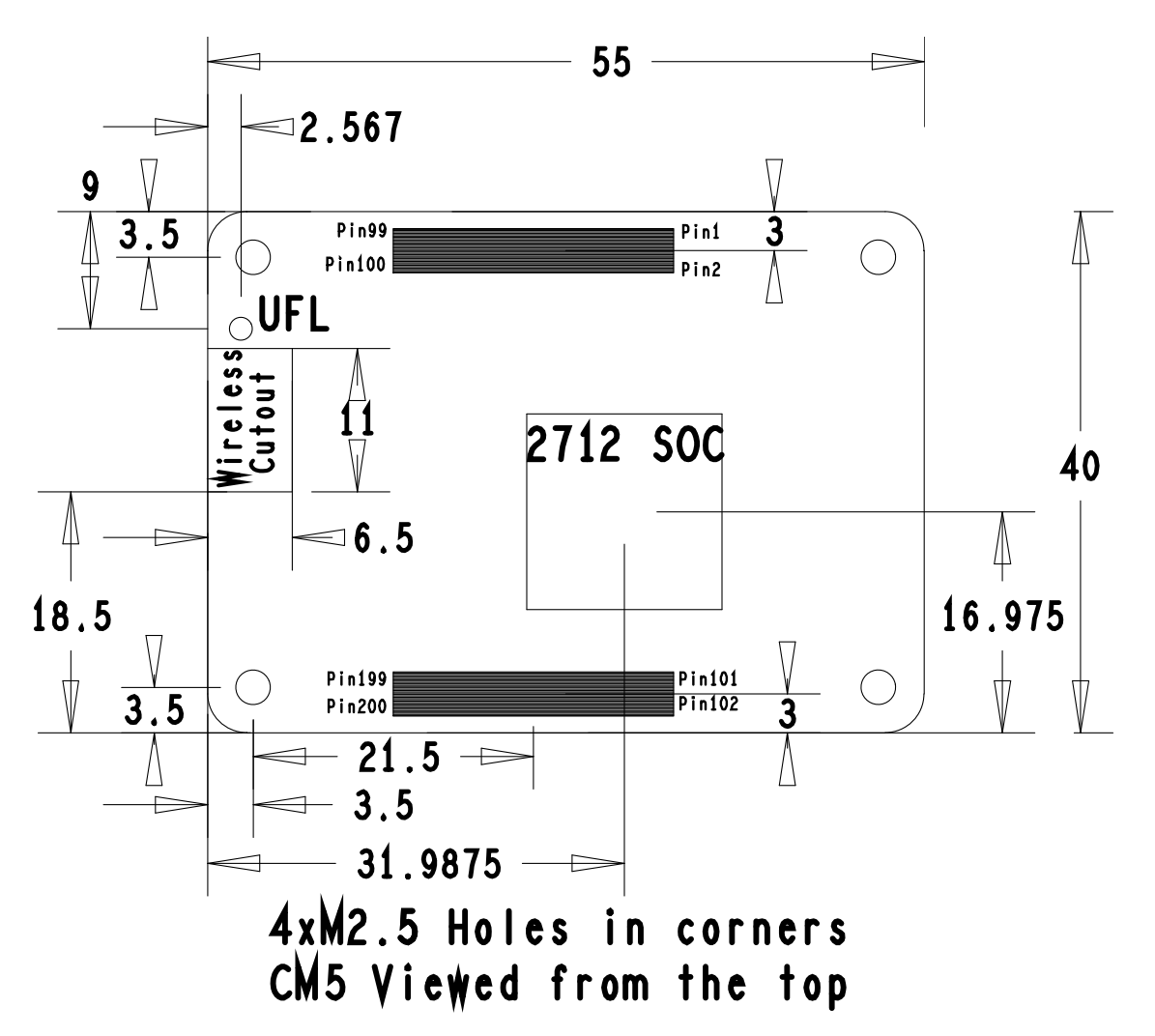
Dimensions
Core Board Size
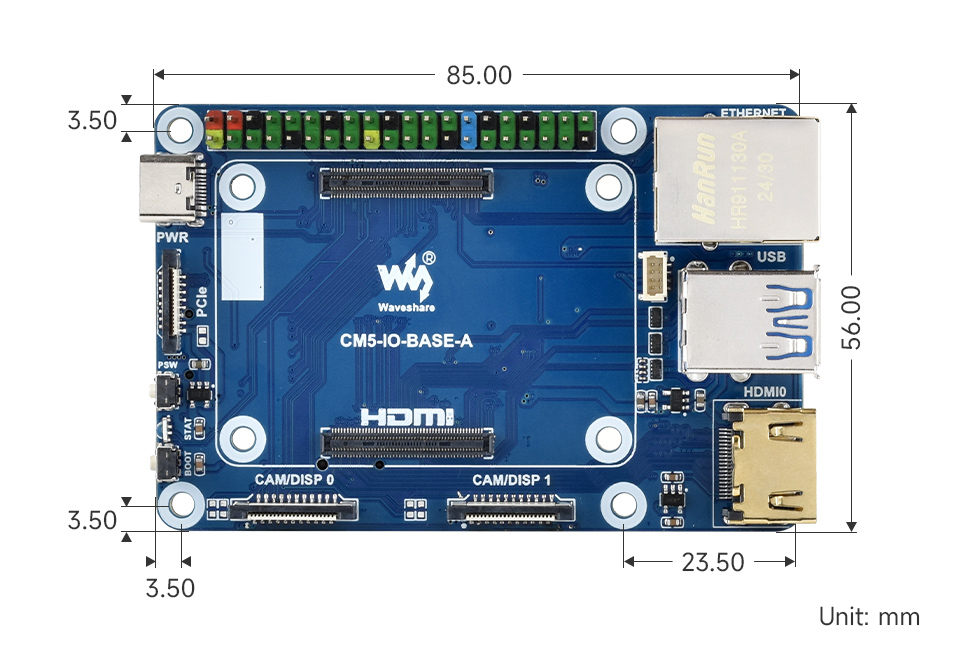
Baseboard Size
Case Size
Please stay informed about it!
Image Flashing
How to Enter Flashing Mode
Choose one of the two
1. The onboard BOOT button, you can press the BOOT button before powering on, and connect to the computer through Type C to let the device enter the flashing mode
Click here for EMMC version
Click here for LITE version
PCIe
Mount
1. Enable PCIE interface
Add in/boot/firmware/config.txt (this step is not required by default and can be skipped): dtparam=pciex1
2. PCIE is gen2 by default, if you need to enable PCIE gen3, then add following to /boot/firmware/config.txt:
dtparam=pciex1_gen=3
3. For PCIe module drivers, please refer to the corresponding Wiki
Fan Control
The PI5 fan defaults to starting when the temperature reaches 50 degrees. If you want to control it at other temperatures, you can do so by adding specific content to /boot/firmware/config.txt, for example:
dtparam=fan_temp0=36000,fan_temp0_hyst=2000,fan_temp0_speed=90 dtparam=fan_temp1=40000,fan_temp1_hyst=3000,fan_temp1_speed=150 dtparam=fan_temp2=52000,fan_temp2_hyst=4000,fan_temp2_speed=200 dtparam=fan_temp3=58000,fan_temp3_hyst=5000,fan_temp3_speed=255
Among them:
fan_temp0/1/2/3 Indicates the temperature (36000 means 36℃)
fan_temp0/1/2/3_speed Indicates the corresponding rotational speed (value up to 255)
fan_temp0/1/2/3_hyst Indicates the hysteresis temperature
For more details, refer to here
Notice: There are only 4 temperatures, 0, 1, 2 and 3, and it's not possible to set other temperatures. The hysteresis temperature must not exceed the step range between two temperatures
MIPI
Support dual MIPI, customers can freely choose CSI or DSI connections
The DSI screen is 800x480 resolution screen by default, please refer to the corresponding WIKI for other resolution screens
DSI
#Add the following to the config.txt file:
sudo nano /boot/firmware/config.txt
#DSI1
dtoverlay=vc4-kms-dsi-7inch,dsi0
#DSI0
dtoverlay=vc4-kms-dsi-7inch,dsi1CSI
sudo nano /boot/firmware/config.txt
| Mode | CAM0 setup statement | CAM1 setup statement |
|---|---|---|
| OV9281 | dtoverlay=ov9281,cam0 | dtoverlay=ov9281,cam1 |
| IMX290/IMX327 | dtoverlay=imx290,clock-frequency=37125000,cam0 | dtoverlay=imx290,clock-frequency=37125000,cam1 |
| IMX378 | dtoverlay=imx378,cam0 | dtoverlay=imx378,cam1 |
| IMX219 | dtoverlay=imx219,cam0 | dtoverlay=imx219,cam1 |
| IMX477 | dtoverlay=imx477,cam0 | dtoverlay=imx477,cam1 |
| IMX708 | dtoverlay=imx708,cam0 | dtoverlay=imx708,cam1 |
Allow one connection to DSI and one connection to CSI, for example, use IMX219 to connect to MIPI1
For example, if you want to connect a DSI display to MIPI0, add the following to the config.txt file
dtoverlay=imx219,cam1 dtoverlay=vc4-kms-dsi-7inch,dsi0

sudo reboot
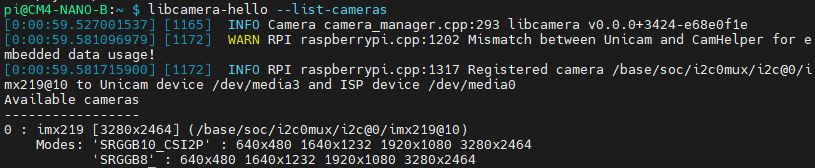
Test Camera
- Enter the camera detection command, and you can see that the camera has been detected
libcamera-hello --list-cameras
- Display the camera screen to the desktop
libcamera-hello -t 0
- Take a photo
libcamera-jpeg -o test.jpg
- Record a 10s video
libcamera-vid -t 10000 -o test.h264
Other commands
Check if the camera is detected
libcamera-hello --list-cameras
Open the corresponding camera
libcamera-hello --camera 1 libcamera-hello --camera 0
Take a photo
libcamera-jpeg -o test.jpg #You can add --camera to specify the camera
Real-Time Clock (RTC)
There is no battery by default, and an additional RTC battery is required
Software Debugging
The default device is /dev/rtc0
Regarding time, by inputting "date" in the command line, you can see the current time. Connecting the Raspberry Pi system to the network will automatically synchronize the time. If the default RTC device is connected and functioning properly, the RTC time will be updated after the automatic network synchronization
sudo hwclock -r Read the RTC time, if there are multiple RTC devices, you can use -f to select the corresponding devices (for example: sudo hwclock -f /dev/rtc1 -r)
Hwclock
System clock -> Hardware clock (RTC)
sudo hwclock -w
Synchronize hardware clock (RTC) -> System clock
sudo hwclock -s
#Need to turn off the network, or disable network time synchronization, otherwise it will be changed backSet the hardware clock time (RTC):
sudo hwclock --set --date="9/8/2023 16:45:05"View the hardware clock (RTC)
sudo hwclock -r
Show version information.
sudo hwclock --verbose
Automated Wakeup
To support a low-power mode for wake-up alarms, add the configuration:
sudo -E rpi-eeprom-config --edit
#Add the following 2 lines
POWER_OFF_ON_HALT=1
WAKE_ON_GPIO=0
#Restart the device after adding (if you connect to the serial port log, you can see that there are update related logs)
sudo reboot
#You can use the following methods to test the function:
echo +600 | sudo tee /sys/class/rtc/rtc0/wakealarm
sudo halt or sudo poweroff
#10 minutes later, it will be awakened and restartedRTC Battery Charging
Note: Before adding this, make sure your RTC battery allows charging and check the maximum allowable voltage
sudo nano /boot/firmware/config.txt
#Add
dtparam=rtc_bbat_vchg=3000000
#Among these, 3,000,000 represents the maximum voltage. Charging will stop when it reaches 3V, and the charging will restart with a trickle charge when the voltage drops below 3VUSB
The onboard USB interface is USB3.2 Gen2 interface, and the speed is not shared (5Gbps rate can be at the same time)
The USB cable interface is USB 2.0, with a shared speed of 480Mbps
The total current is limited to 2A
Resources
Datasheets and Schematic Diagram
CM5 Core board datasheet
CM5 Core board 3D
CM5 Core introduction
CM5-IO-BASE-A Schematic diagram
CM5-IO-BASE-A_3D
Related Links
FAQ
Question: Can the old versions of the Raspberry Pi operating system be used with CM5?
CM5 requires the latest version of Raspberry Pi OS Bookworm (2024-11-19 or later).
Support
Monday-Friday (9:30-6:30) Saturday (9:30-5:30)
Email: services01@spotpear.com
