- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- PRODUCTS
- >
- Robot-Car-Drone
- >
- PI-Robot
- /
- Other


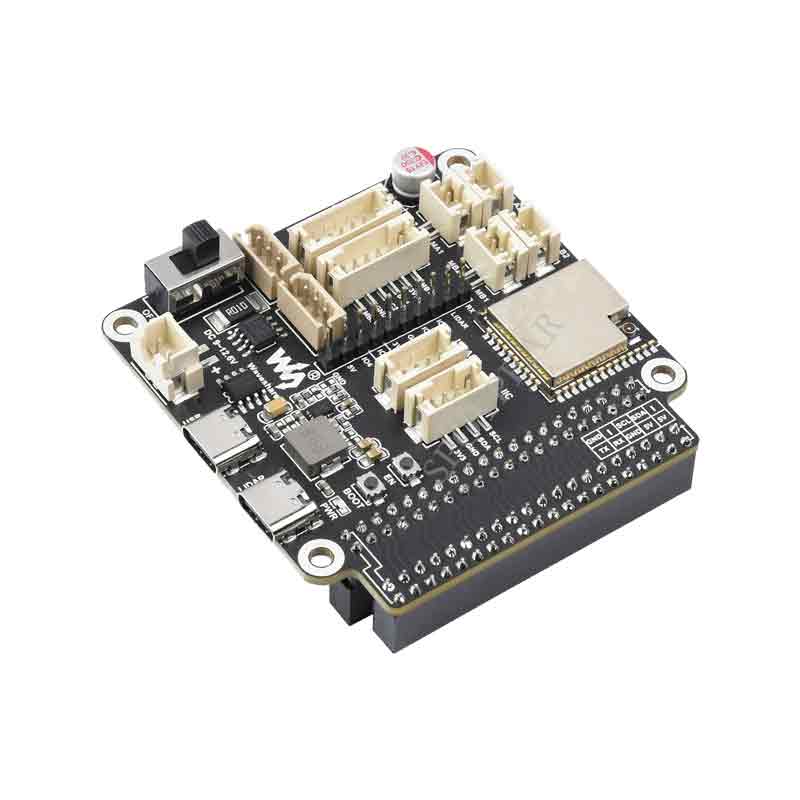

ESP32 General Driver board Robots multi-functional WIFI Bluetooth ESP-NOW communication Raspberry Pi
$26.89
The multifunctional driver board specially designed for robots provides more possibilities for robots. Based on the ESP32-WROOM-32 module, Arduino IDE can be used for development, and it supports a variety of wireless communication methods, including WIFI, Bluetooth, and ESP-NOW.
【Overview】
[] The multifunctional driver board specially designed for robots provides more possibilities for robots. Based on the ESP32-WROOM-32 module, Arduino IDE can be used for development, and it supports a variety of wireless communication methods, including WIFI, Bluetooth, and ESP-NOW.
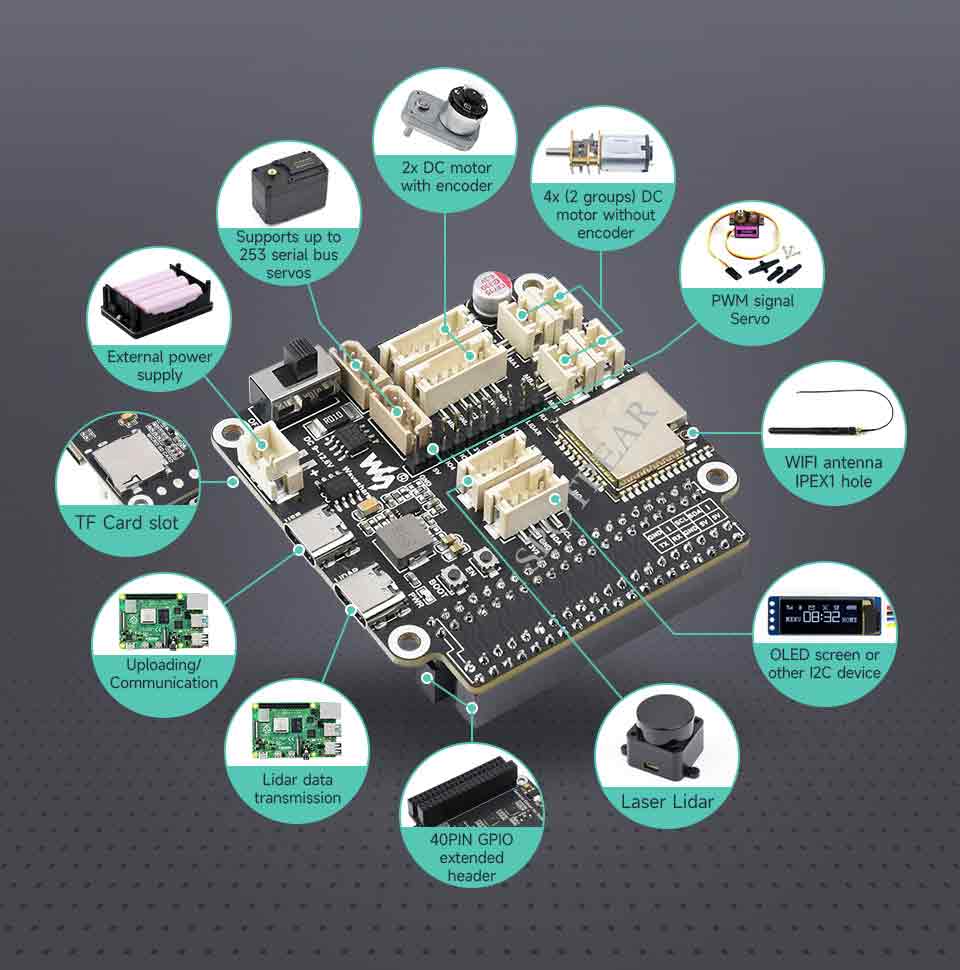
[] Onboard versatile commonly used robot component interfaces, including DC motor interface with encoder, DC motor interface without encoder, bus servo interface, IIC interface, Lidar interface, PWM servo interface, SD card slot, etc.
[] A variety of resources are on board, which is convenient for robot project construction, including a 9-axis IMU, temperature sensor, automatic download circuit, Lidar serial port to USB circuit, bus servo control circuit, etc.
【Features】
[] Based on the ESP32-WROOM-32 module, supports wireless communication methods such as WIFI, Bluetooth, and ESP-NOW.
[] Onboard motor control interface for 2x DC motors with encoder or 4x DC motors (two groups) without encoder.
[] Onboard serial bus servos control interface for controlling up to 253 ST3215 serial bus servos and obtaining servo feedback.
[] Onboard 9-axis IMU can obtain attitude and heading information at any time.
[] 7~13V voltage input can be powered directly by 2S or 3S lithium battery.
[] Automatic download circuit for easy uploading demos.
[] Support input voltage and current monitoring.
[] Onboard TF card slot.
[] Onboard Lidar interface and integrated UART to USB function.
[] IIC interface for expanding other peripherals such as OLED, IMU, and other IIC communication protocols.
[] Multi-functional extended interface, adapting to remaining interfaces for additional functions, such as controlling servos or relays.
[] 40PIN extended header for connecting to Raspberry Pi, Jetson Nano, and other host computers, communicating via serial port or IIC, and powering the host computer.
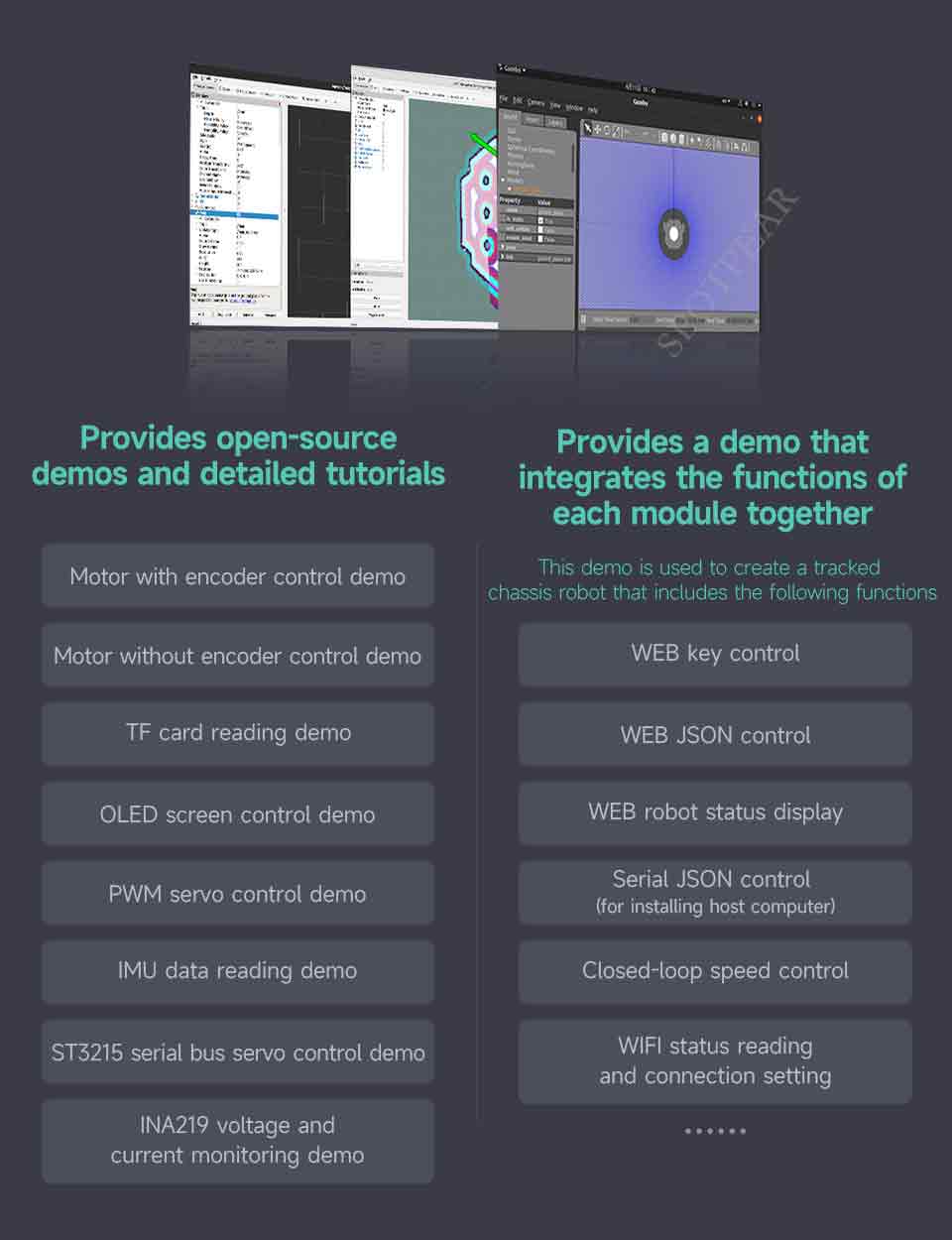
[] Provides open-source demos for onboard resources, and detailed tutorials for beginners to get started.
【Specifications】
[] Main Controller : ESP32-WROOM-32
[] Power Supply : DC 7-13V
[] Power Port : XH2.54
[] Antenna Connector : IPEX1
[] Download Interface : Type-C
[] Control Chip : ESP32
[] Wireless Communication : WIFI, Bluetooth, ESP-NOW
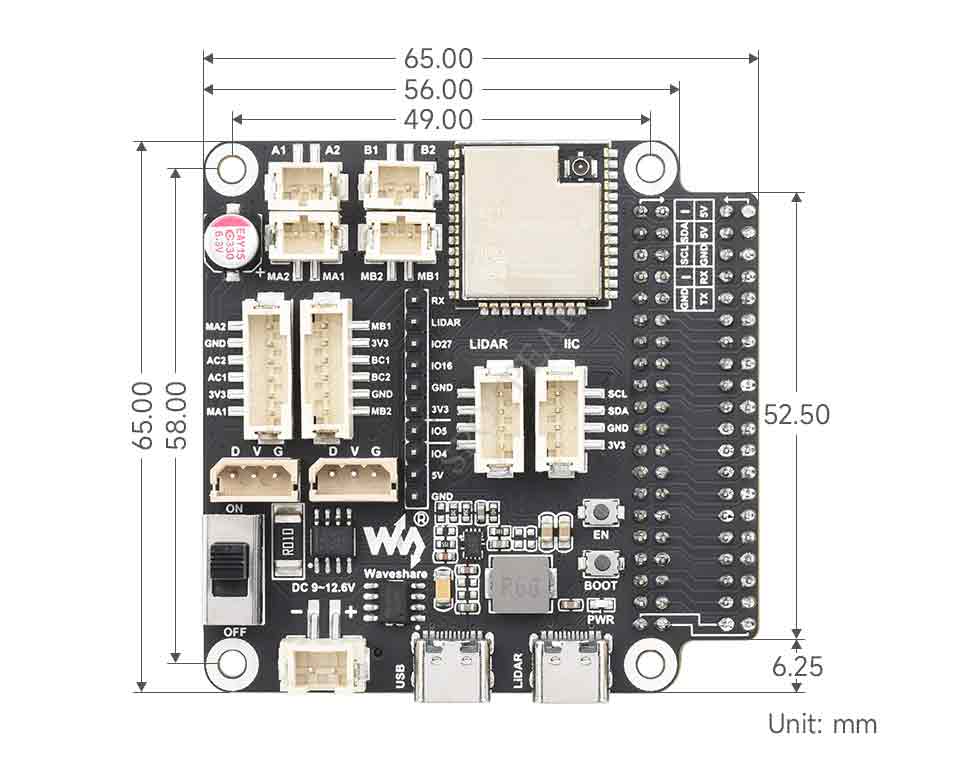
[] Dimensions : 65 x 65mm
[] Mounting hole spacing : 49 x 58mm
[] Mounting hole diameter : 3mm
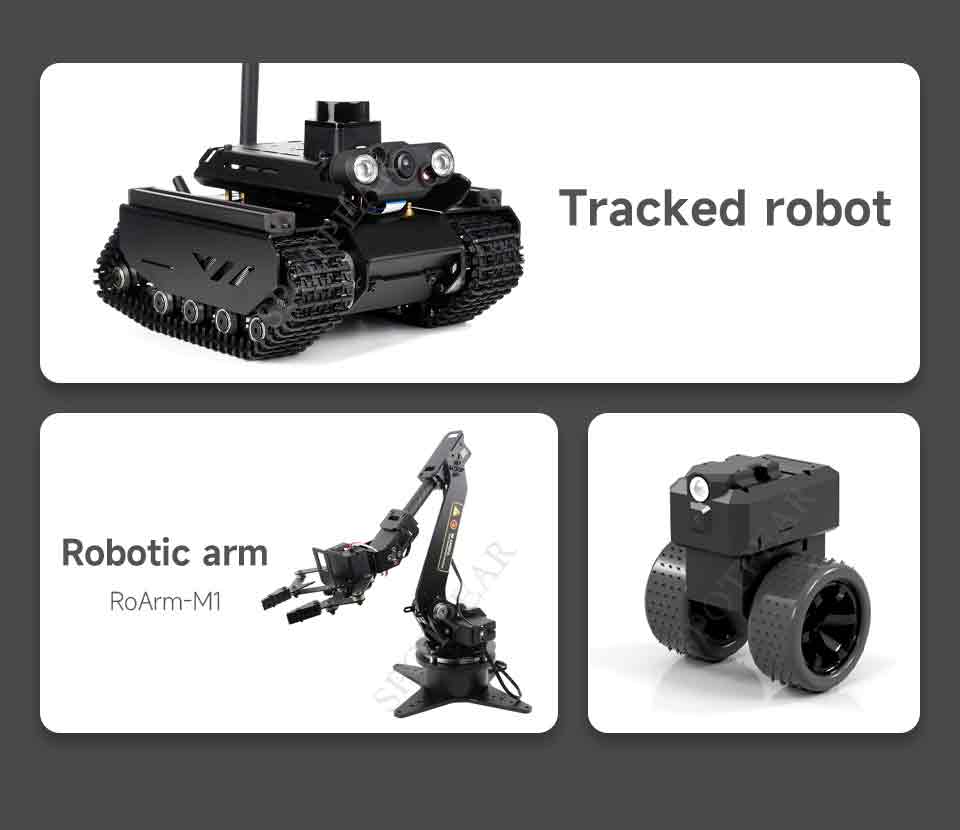
【Rich Peripheral Interfaces】
[] Suitable For Different Types Of Robots
【ESP32 Main Controller】
[] Rich Resources For Secondary Development
[] Built-In WiFi And Bluetooth, As Well As ESP-NOW Support, For Wireless Communication

【Support Multiple Peripheral Connections】
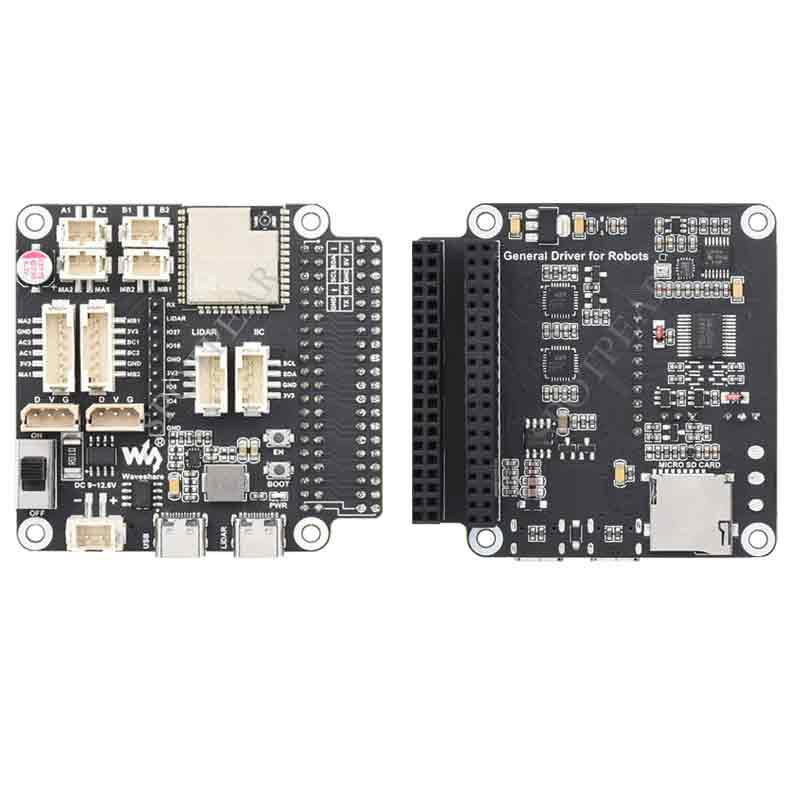
【40PIN GPIO Extended Header】
[] The inner side 40PIN header is for directly connecting to the Raspberry Pi or other host boards. And extend the outer side 40PIN header for connecting with other HATs via cables

【Serial Bus Servo Control】
[] Allows Controlling Up To 253 ST3215 Serial Bus Servos At The Same Time
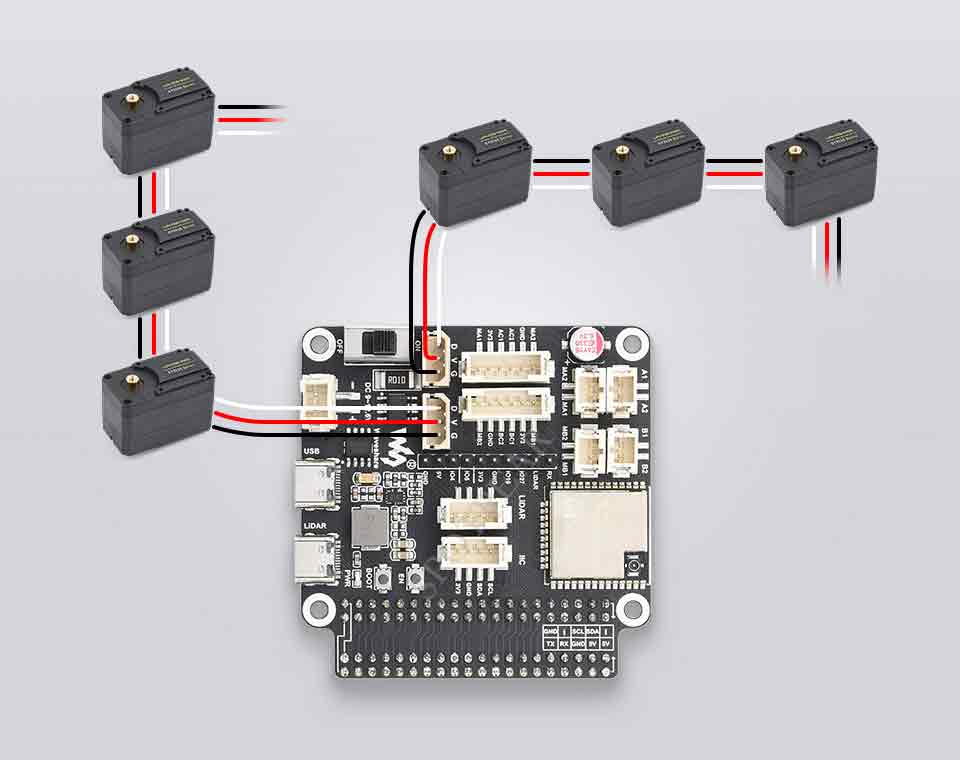
[] Note: One channel UART can control up to 253 bus servos, but due to the high power of the servos, it is necessary to consider whether the power supply solution is enough when using too many servos.
【Voltage And Current Monitoring】
[] Onboard Voltage/Current Monitoring Chip To Obtain The Power Supply Status Of The Robot At Any Time

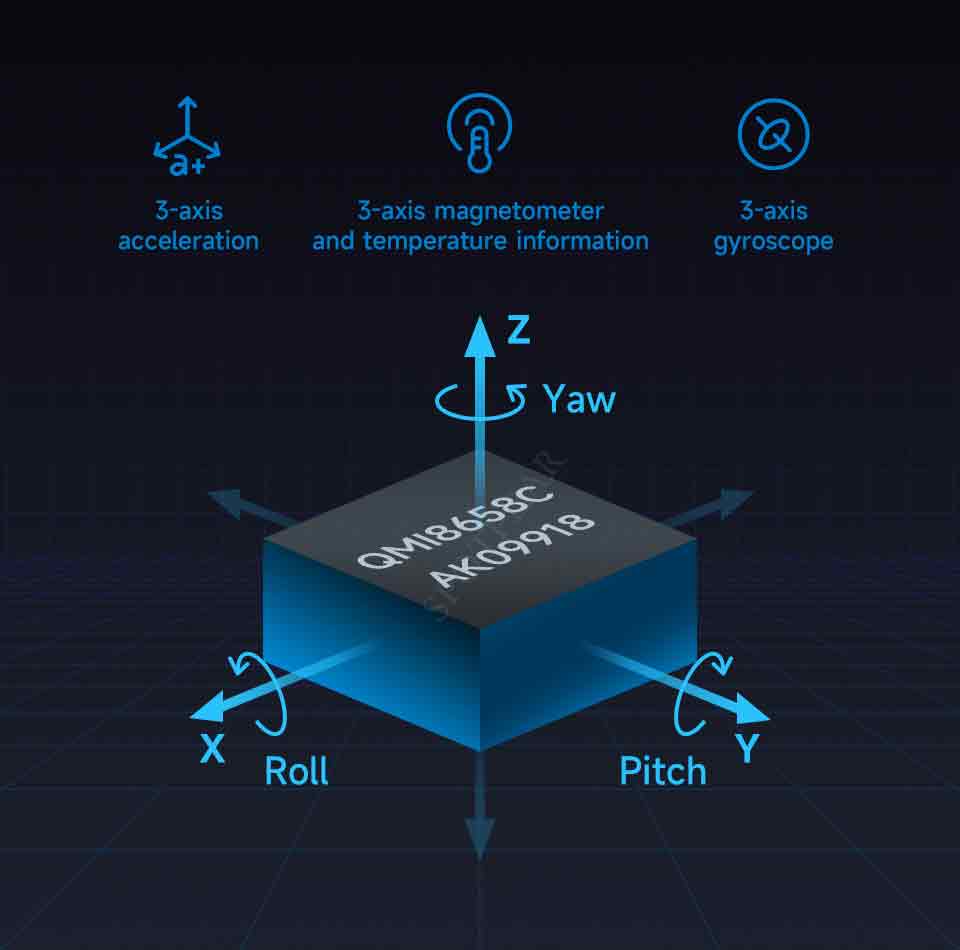
【Onboard 9-Axis IMU】
[] Onboard QMI8658C + AK09918, For Detecting Movement, Orientation, And Magnetic
[] Support Obtaining The Heading Angle Of The Robot Anytime And Anywhere
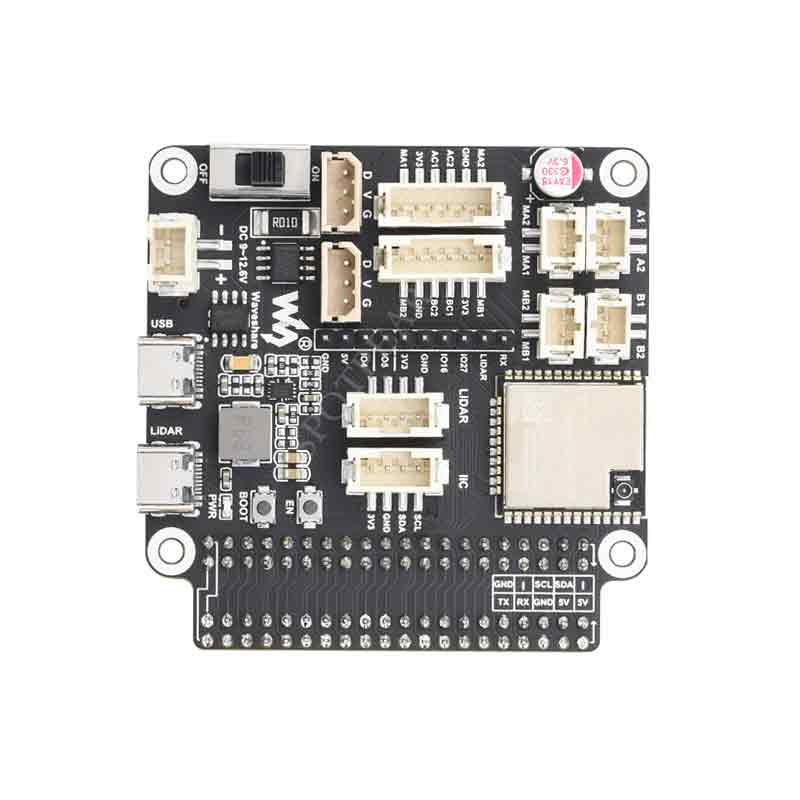
【What's On Board】
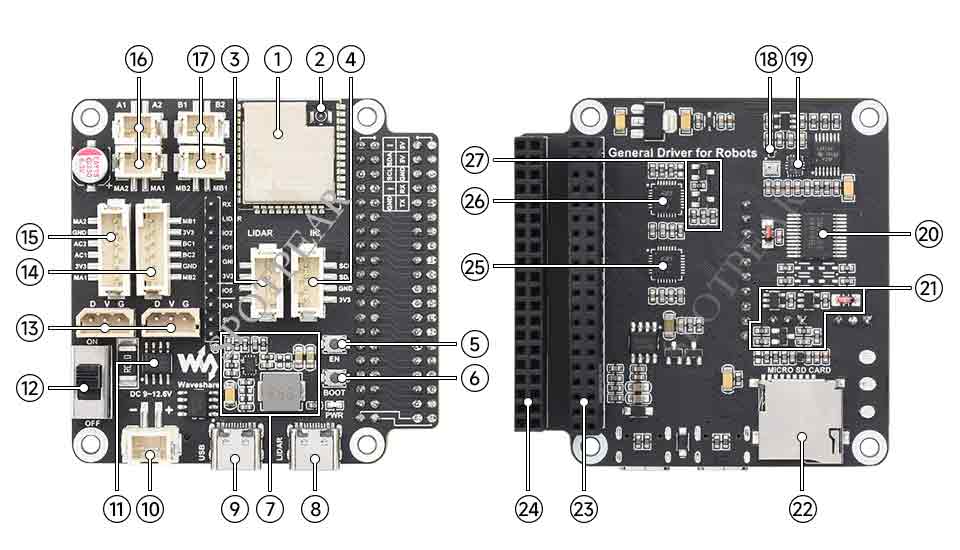
1. ESP32-WROOM-32 controller module : Can be developed using Arduino IDE
2. IPEX1 WIFI connector : For connecting WIFI antenna to increase the wireless communication distance
3. LIDAR interface : Integrated radar adapter function
4. I2C peripheral expansion interface : For connecting with OLED screen or other I2C sensors
5. Reset Button : Press and release to reboot the ESP32
6. Download button : The ESP32 will enter the download mode after powering on
7. DC-DC 5V voltage regulator circuit : Power supply for host computers such as Raspberry Pi or Jetson nano
8. Type-C port (LADAR) : LIDAR data transmission
9. Type-C port (USB) : ESP32 communication interface, for uploading programs to ESP32
10. XH2.54 power port : Support DC 7~13V input, can directly power the serial bus servos and motors
11. INA219 : voltage/current monitoring chip
12. Power ON/OFF : External power supply ON/OFF
13. ST3215 serial bus servo interface : For connecting with ST3215 serial bus servo
14. Motor interface PH2.0 6P : Group B interface for motor with encoder
15. Motor interface PH2.0 6P : Group A interface for motor with encoder
16. Motor interface PH2.0 2P : Group A interface for motor without encoder
17. Motor interface PH2.0 2P : Group B interface for motor without encoder
18. AK09918C : 3-axis electronic compass
19. QMI8658C : 6-axis motion sensor
20. TB6612FNG : Motor Control Chip
21. Serial bus servo control circuit : for controlling multiple ST3215 serial bus servos and obtaining servos feedback
22. TF card slot : Can be used to store logs or WIFI configurations
23. 40PIN GPIO header : For connecting with Raspberry Pi or other host boards
24. 40PIN extended header : Easy to use the GPIO pins of Raspberry Pi or other host boards
25. CP-2102 : UART to USB, for radar data transmission
26. CP-2102 : UART to USB, for ESP32 communication
27. Automatic download circuit : For Uploading programs to the ESP32 without pressing the EN and BOOT buttons
【Provides Open-Source Demos And Detailed Tutorials】
【Outline Dimensions】