- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- PRODUCTS
- >
- Common Module
- >
- Converter
- >
- UART







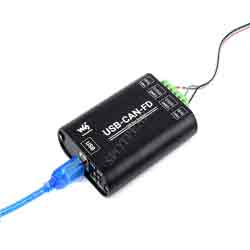
Raspberry Pi USB to CAN adapter analyzer Multiple work mode for Windows PC / Jetson Nano
$23.89
Raspberry Pi USB to CAN adapter analyzer Multiple work mode STM32 chip scheme for Windows PC / Jetson Nano, USB To CAN Adapter Model A, STM32 Chip Solution, Multiple Working Modes, Multi-System Compatible
USB To CAN Recommend

Features
- Support CAN2.0A (standard frame) and Can2.0B (extended frame)
- Support CAN communication Potter rate range: 5kbps ~ 1Mbps, which can customize the CAN Potter rate
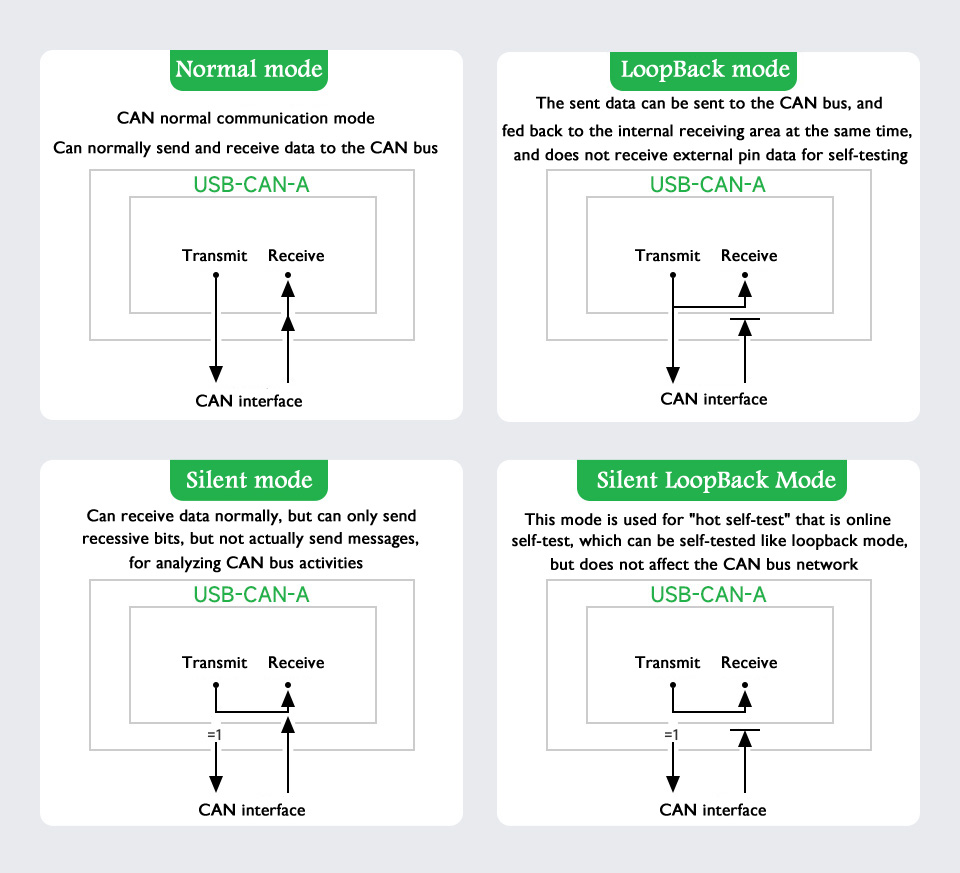
- Support four working modes: Normal mode, LoopBack mode, Silent mode , Silent LoopBack Mode
- Support multiple CAN data sending methods: single -frame sending, multi -frame sending, manual sending, regular sending and cycle sending
- Support multiple CAN data receiving methods: configured data that only receives the specified ID, or you can specify the data that the ID is automatically answered to the configuration data
- Support and send CAN data saved as TXT or Excel text
- Support CAN bus detection, which is convenient for viewing CAN bus status
- CAN receiving data shows that the time logo is available, which can be displayed in order, or it can refresh the display
- Support the communication baud rate of USB virtual COM port (9600 ~ 2000000bps), default 2000000bps
- Support to set up working parameters through configuration software or serial instructions.
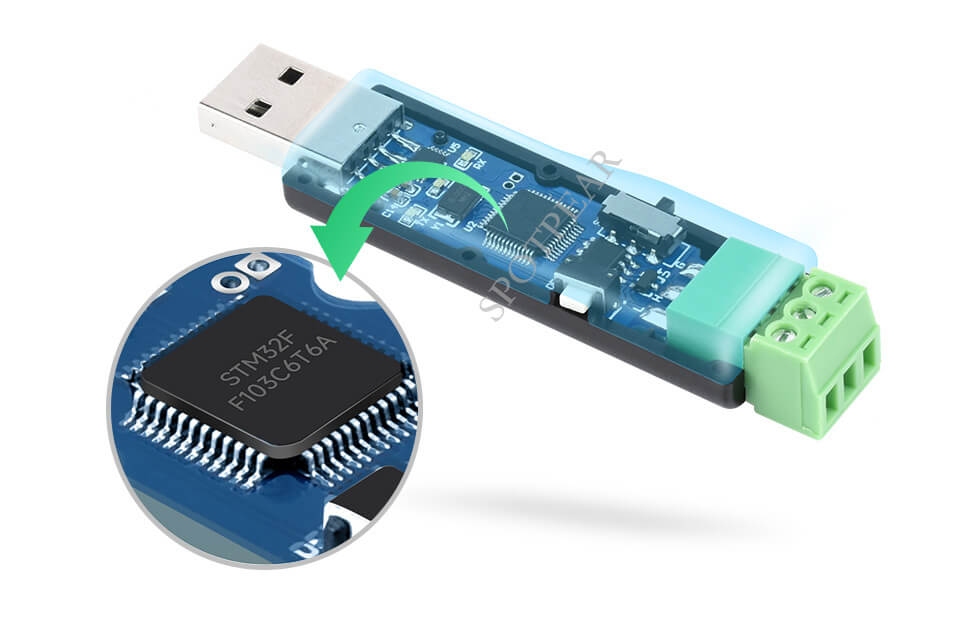
- Adopt the STM32 import chip solution, the communication is stable and reliable
- Elective TVS (transient voltage suppression pipe), effectively suppress the wave voltage and transient peak voltage of the circuit
- Provide Windows version of Chinese and English upper machine software, easy to use
- Support secondary development, just handle the sending and receiving command

The data of the CAN bus can be collected on the computer through the USB, and the receipt control, data analysis, collection and monitoring of the CAN bus network can be achieved.

Support CAN communication Potter rate range: 5kbps ~ 1Mbps, which can customize the CAN Potter rate
Support Windows XP/7/8/10/1/1, and Raspberry Pi OS and Jetson Nano under the Raspberry Pi Pi OS and Jetson Nano.

Using the original imported STM32F103 main control chip, the communication is stable and reliable