- sales/support
Google Chat: zj734465502@gmail.com
- sales
+86-0755-88291180
- sales01
sales01@spotpear.com
- sales02
dragon_manager@163.com
- support
services01@spotpear.com
- CEO-Complaints
manager01@spotpear.com
- sales/support
WhatsApp:13246739196





4-DOF High-Torque Bus Servo Desktop Robotic Arm Kit Based on ESP32
$189.99
Robot Arm Gripper Recommend




【Features】
[] RoArm-M2-S is a four-degree-of-freedom smart robotic arm designed for innovative applications. With a lightweight structure, the body weighs less than 850g and can handle an effective payload of 0.5kg@0.5m. It can be flexibly installed on various mobile platforms. The 360° omnidirectional base movement range, combined with three flexible joints, creates a reachable workspace with a diameter of 1m.
[] The joint direct drive design improves repeatability while enhancing structural reliability. Innovative dual-drive technology doubles the shoulder joint torque. The main control module uses ESP32 MCU, supporting various wireless control methods, providing control interfaces, and rich communication protocols. It can easily connect to a variety of commonly used devices.
[] User-friendly cross-platform web applications and a simple and intuitive coordinate control mode significantly reduce the learning curve. Rich text, image, and video tutorials help you quickly get started and use. Compatible with ROS2 and various host computers, supporting multiple wireless and wired communication methods. Equipped with expandable component modules, supporting custom creation of multifunctional end effectors to meet the needs of innovative applications.
[] RoArm-M2-S achieves outstanding balance in lightweight design, ease of use, scalability, and open innovation. It is a multifunctional robotic arm that integrates intelligent control, human-computer interaction, and customizable development. If you need a solution that combines flexibility, scalability, and ease of use, RoArm-M2-S is an excellent choice.
【Product Specifications】
[] Number of Degrees of Freedom (DOF): 4
[] Workspace:
Horizontal Diameter: 1090mm (Max, 360° omnidirectional)
Vertical Range: 798mm (Max)
[] Operating Voltage: Standard 12V 5A power supply, compatible with 3S lithium battery pack
[] Payload Capacity: 0.5kg@0.5m
[] Repeatability: ≈±4mm (under the same load)
[] Driver Rotation Speed: 40rpm (No load, no torque limit)
[] Working Range:
BASE-360°
SHOULDER-180°
ELBOW-180°
HAND-135°/270°
[] Drive Mode: TTL BUS SERVO (TTL Bus Servo), Direct Drive
[] Number of Drivers: 5
[] Joint Angle Sensor: 12-bit 360° Magnetic Encoder
[] Driver Stall Torque: 30KG.CM @12V
[] Joint Feedback Information: Driver status, joint angle, rotation speed, joint load, driver voltage, driver current, driver temperature, driver operating mode
[] Onboard Main Control: ESP32-WROOM-32
[] Onboard Main Control Module Features: WiFi, BT, Dual Core, 240MHz
[] Wireless Control Modes: 2.4G-WiFi, ESP-NOW
[] Wired Control Modes: USB, UART
[] Manual Operation Mode: Web-based control interface
[] Robotic Operation Mode: Commands using UART/USB/ESP-NOW*/HTTP communication in JSON data format (*Currently, ESP-NOW's JSON command interaction has no feedback information)
[] Connectable Host Computers: Raspberry Pi, Jetson Orin Nano, PC, and other devices supporting USB connection
[] End Effector Function: Default is gripper function, can be modified to an additional degree of freedom
[] LED Fill Light Power: Less than 1.5W
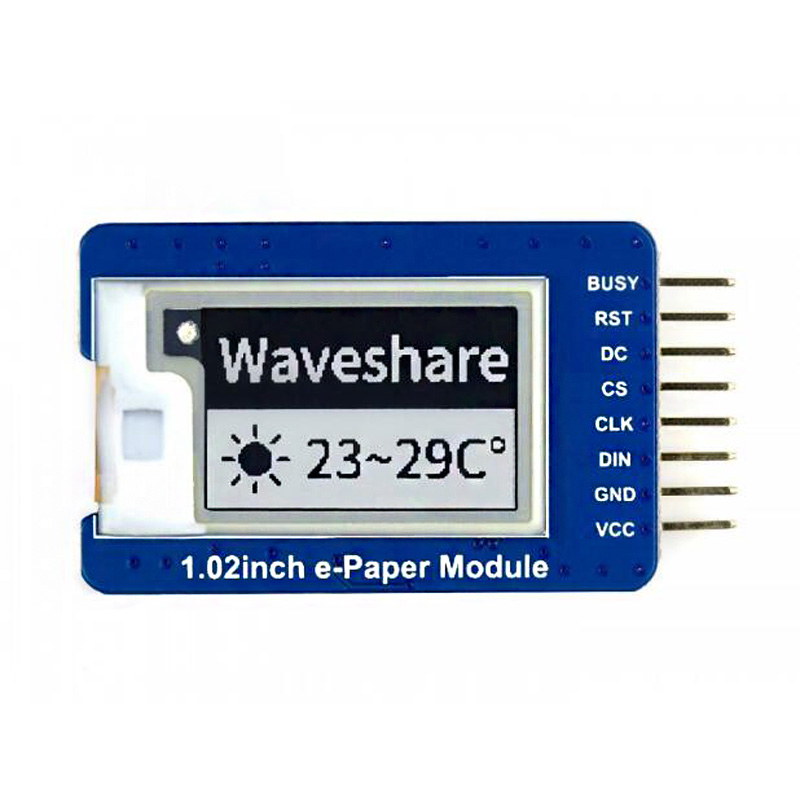
[] OLED Screen Size: 0.91 inch
[] Other Onboard Functions: Two 12V switches, 9-DOF IMU
[] Robotic Arm Weight: 826 ± 15g (excluding desktop clamp)
[] Desktop Clamp Weight: 286 ± 10g
[] Supported Desktop Thickness for Desktop Clamp: <72mm
[] Robotic Arm Example Functions: 3D Cartesian Coordinate Control (Inverse Kinematics Control), Dynamic External Force Adaptive Control, Joint Angle Control, Work Information Feedback, FLASH File System Operation, Step Recording and Playback, ESP-NOW Control, Imitation Mode (Drag Teaching), LED Lighting Control, Onboard 12V Switch Control, WiFi-related Function Settings, Startup Task Settings, Bus Servo-related Function Settings, Feedback Mode Settings, End Effector Assembly Method Settings, and more. Note: This is a general overview; specific functions and related instructions can be found in the open-source documentation.
【Interface Overview】
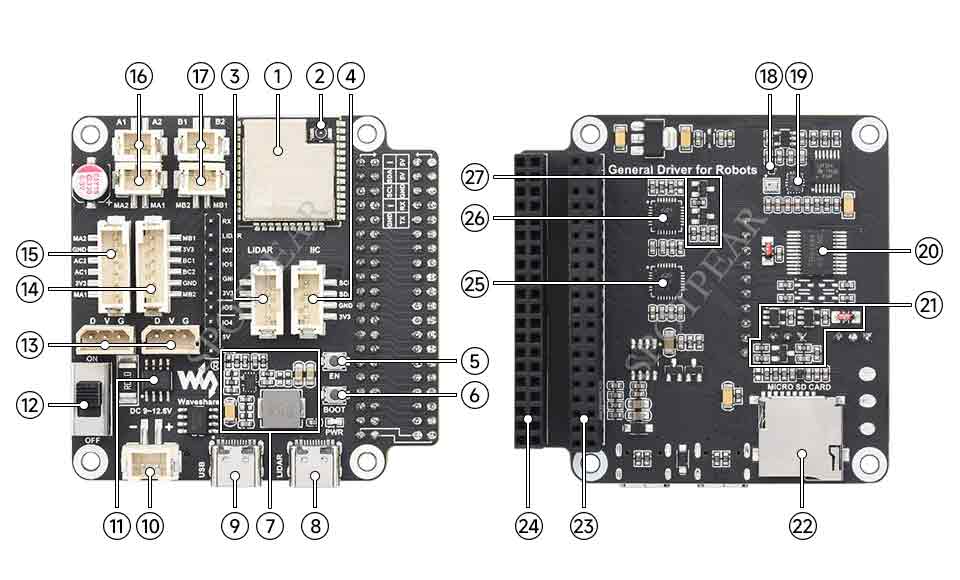
1. WROOM-32 Main Control Module
Development using Arduino IDE.
2. IPEX Generation 1 WIFI Interface
Used to connect WIFI antennas to extend wireless communication range.
3. Laser Radar Interface
Integrated with the function of a radar adapter board.
4. I2C Peripheral Expansion Interface
Can be used to connect OLED screens or other I2C sensors.
5. Reset Button
Press and release; ESP32 will restart.
6. Download Button
Press at startup; ESP32 will enter download mode.
7. DC-DC 5V Voltage Stabilization Circuit
Supplies power to upper computers like Raspberry Pi or Jetson Nano.
8. Type-C Interface (LADAR)
Laser radar data interface.
9. Type-C Interface (USB)
ESP32 serial communication interface; used to upload programs to ESP32.
10. XH2.54 Power Interface
Input DC 7-13V; directly powers bus servos and motors.
11. INA219
Voltage and current monitoring chip.
12. Switch
Controls external power supply.
13. ST3215 Bus Servo Interface
Used to connect ST3215 bus servos.
14. Motor Interface PH2.0 6P
Motor interface for Group B with encoder.
15. Motor Interface PH2.0 6P
Motor interface for Group A with encoder.
16. Motor Interface PH2.0 2P
Motor interface for Group A without encoder.
17. Motor Interface PH2.0 2P
Motor interface for Group B without encoder.
18. AK09918C
3-axis electronic compass.
19. QMI8658C
6-axis motion sensor.
20. TB6612FNG
Motor control chip.
21. Bus Servo Control Circuit
Used to expand multiple ST3215 bus servos and obtain servo feedback.
22. SD Card Slot
Used for storing logs or WIFI configurations.
23. 40PIN Upper Computer Interface
Convenient for connecting to Raspberry Pi or RDK X3.
24. 40PIN Expansion Interface
Convenient for using pins on Raspberry Pi or RDK X3.
25. CP2102
Serial to USB, used for radar data transmission.
26. CP2102
Serial to USB, used for ESP32 serial communication.
27. Automatic Download Circuit
For uploading programs to ESP32 without pressing EN and BOOT buttons.
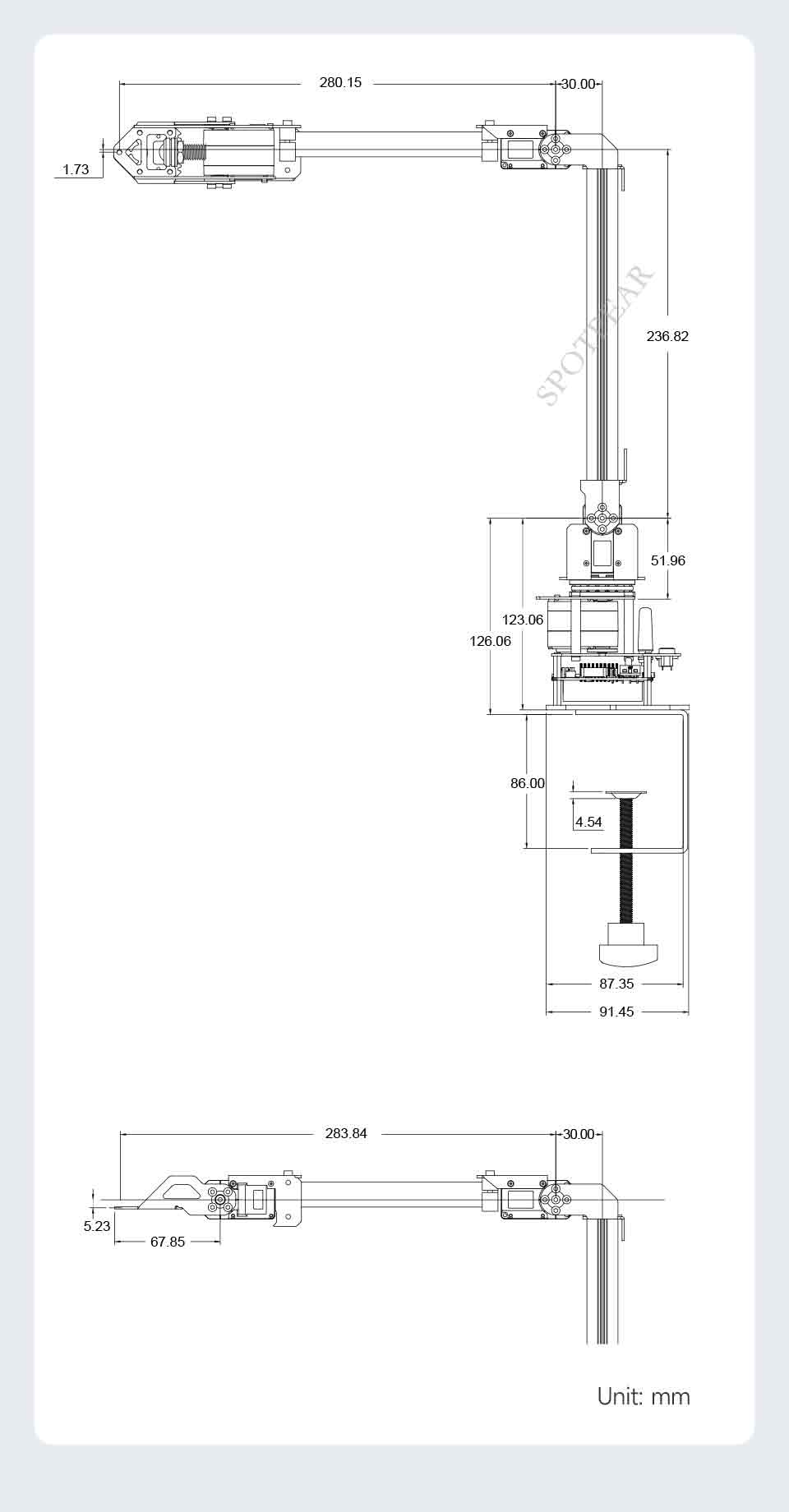
【Product Dimensions】