- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
- HOME
- >
- ARTICLES
- >
- Common Moudle
- >
- GSM-GPS
LC76G GNSS Module User Guide
Overview
The LC76G GPS Module is a Multi-GNSS (Global Navigation Satellite System) module, supports GPS, BeiDou (BDS), GLONASS, Galileo, and QZSS systems, allows multi-system combined or single-system independent positioning. Supports EPO™ (Extended Predictive Orbit) and EASY™ (Embedded Assist System) function, provides a good positioning experience of fast, accurate, high-performance.
This module provides control demos for Raspberry Pi, Arduino, Raspberry Pi Pico and ESP32.
Parameters
| Model | LC76G(AB) | L76K | L76B |
|---|---|---|---|
| Compatible | |||
| GNSS | GPS/GLONASS/Galileo/BDS/QZSS | GPS/GLONASS/BDS/QZSS | GPS/BDS/QZSS |
| Form Factor | LCC | LCC | LCC |
| Dimensions | 9.7×10.1×2.4 | 9.7×10.1×2.4 | 9.7×10.1×2.4 |
| Weight (g) | 0.6 | 0.4 | 0.5 |
| Normal Operating Temperature | -40℃ ~+85℃ | -40℃ ~+85℃ | -40℃ ~+85℃ |
| Storage Temperature | -40℃ ~+90℃ | -40℃ ~+90℃ | -40℃ ~+90℃ |
| Main Feature | |||
| Function | Standard | Standard | Example |
| Chip | AG3352Q | AT6558R | MT333 |
| L1 Receiver (Channel) | 47 tracking ch | 32 tracking ch/72 acquisition ch | 22 tracking ch/66 acquisition ch |
| L1 Receiver SBAS | Support | N/A | Support |
| A-GNSS | Support | Support | Support |
| Sensitivity (Auto-aquisition) | -147dBm | -148dBm | -148dBm |
| Sensitivity (re-acquisition) | -159dBm | -160dBm | -160dBm |
| Sensitivity (tracking) | -166dBm | -162dBm | -163dBm |
| TTFF (Time To First Fix) Cold Starts | 26s, Autonomous 12s, with EASY™ 5s,with EPO™ | 30s, Autonomous 5.5s, With AGNSS | 35s, Autonomous 15s, with EASY™ |
| TTFF (Time To First Fix) Warm Starts | 20s, Autonomous 2s, with EASY™ | / | 30s, Autonomous 5s, with EASY™ |
| TTFF (Time To First Fix) Hot Starts | 1s | 2s | 1s |
| Position Accuracy | 1.5m CEP | 2.0m CEP | 2.5m CEP |
| Velocity Accuracy | 0.1m/s | 0.1m/s | 0.1m/s |
| Acceleration Accuracy (Max) | 0.1m/s² | 0.1m/s² | 0.1m/s² |
| Timing Accuracy | 100ns | 30ns | 10ns |
| Update Rate (Max) | 10Hz | 5Hz | 10Hz |
| Default Baudrate | 115200bps | 9600bps | 9600bps |
| Geo-fence | ⚪ | / | ⚪ |
| Interference Detection | ⚪ | / | ⚪ |
| Anti-jamming | ⚪ | / | ⚪ |
| LNA | ⚪ | ⚪ | ⚪ |
| Electrical Parameters | |||
| Power Supply | 2.55to3.6V | 2.7Vto3.4V | 2.8Vto4.3V |
| Power Consumption (Acquisition) | 36mA(G3B) | 29mA (GPS+BDS) | 29mA (GPS+BDS) |
| Power Consumption (Tracking) | 36mA(G3B) | 29mA (GPS+BDS) | 18mA (GPS+BDS) |
| Power Consumption (RTC backup/low power consumption | 13μA | 8μA | 7μA |
| Interface | |||
| UART | ⚪ | ⚪ | ⚪ |
| IIC (NMEA) | ⚪ | / | ⚪ |
| Reset | ⚪ | ⚪ | ⚪ |
| Timing Pulse | ⚪ | ⚪ | ⚪ |
| Antenna | |||
| Short circuit and open circuit detection | ⚪ | ⚪ | ⚪ |
| Antenna Type | Active, Passive | Active, Passive | Active, Passive |
| Antenna Power Supply | External or Internal | External or Internal | External or Internal |
Interface
| Interface | Description |
|---|---|
| VCC | Power supply (3.3V~5V) |
| GND | Ground |
| TX | UART data output |
| RX | UART command input |
| PPS | GPS status indicator |
| RST | Reset pin |
| SDA | I2C data pin |
| SCL | I2C clock pin |
NMEA0183
- The host control output NMEA0183 information from the serial port and analyzes NMEA 0183 sentence to output the information.
- NMEA 0183 is a standard format developed by the National Marine Electronics Association for marine electronic equipment. It has now become a unified RTCM (Radio Technical Commission for Maritime Services) standard protocol for GPS navigation equipment.
- NMEA 0183 includes 7 protocol frames including $GPZDA, $GPRMC, $GPVTG, $GPGNS, $GPGGA, $GPGSA, $GPGSV*3, $GPGLL, $GPGST, among which the first two characters followed by $ represent the country or region. For example, GPGGA stands for American GPS, BDGGA stands for China Beidou, GLGGA stands for Russia GLONASS, GAGGA stands for EU Galileo, and GNGGA stands for multi-satellite joint positioning.
- Take $GPRMC as an example to briefly describe the information represented by each part of the protocol frame. Please refer to the NMEA 0183 manual for the other 6 protocol frames.
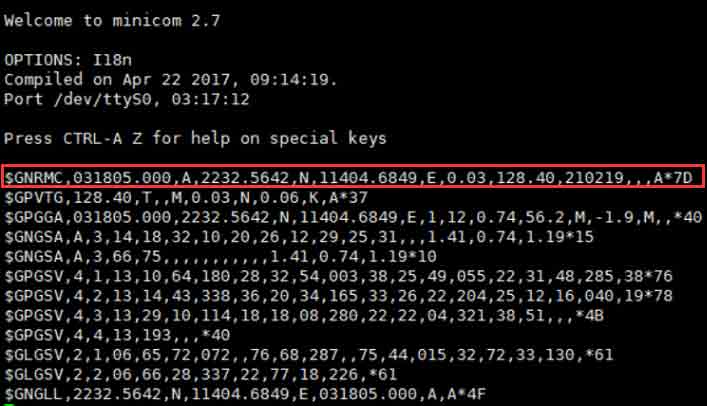
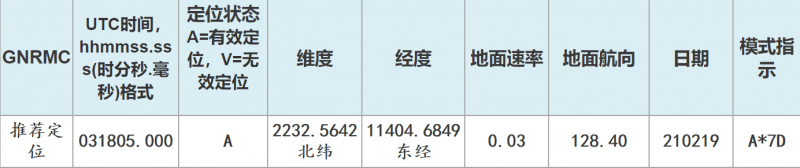
Recommended Minimum Specific GPS/TRANSIT Data (RMC) recommended positioning information $GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12> *hh<CR><LF> $GNRMC,010555.000,A,2232.4682,N,11404.6748,E,0.00,125.29,230822,,,D*71 <1> UTC time, hhmmss.sss (hour, minute, second) format <2> Positioning state, A=valid positioning, V=invalid positioning <3> Latitude ddmm.mmmm (degrees and minutes) format (the front 0 will also be transmitted) <4> Latitude hemisphere N (Northern Hemisphere) or S (Southern Hemisphere) <5> Longitude dddmm.mmmm (degrees and minutes) format (the preceding 0 will also be transmitted) <6> Longitude hemisphere E (East longitude) or W (West longitude) <7> Ground speed (000.0~999.9 knots, the preceding 0 will also be transmitted) <8> Ground heading (000.0~359.9 degrees, with true north as the reference, the preceding 0 will also be transmitted) <9> UTC date, ddmmyy (day month year) format <10> Magnetic declination (000.0~180.0 degrees, the previous 0 will also be transmitted) <11> Magnetic declination direction, E (East) or W (West) <12> Mode indication (only NMEA0183 version 3.00 output, A=autonomous positioning, D=difference, E=estimation, N=data invalid) *hh: The last check code *hh is the data used for parity. In normal use, it is not necessary, but when there is strong electromagnetic interference in the surrounding environment, it is recommended to use. hh represents the bitwise XOR value of all characters of "$" and "*" (excluding these two characters). Individual manufacturers define their own statement format starting with "$P", followed by a 3-character manufacturer ID number, followed by a custom data body.
PAIR Sentence
This chapter describes common PAIR messages (proprietary NMEA messages defined by the chipset vendor). "P" for proprietary messages and "AIR" for chipset vendor-defined commands.
| Sentence | Description | Example | Function |
|---|---|---|---|
| $PAIR864,<PortType>,<PortIndex>,<Baudrate>*<Checksum> | Configure NMEA UART baudrate | $PAIR864,0,0,115200*1B $PAIR864,0,0,9600*13 | Set the baudrate as 115200/9600 <CMD>Support the following baudrate |
| $PAIR050, | Set the positioning frequency | $PAIR050,1000*12 | Set the positioning frequency as 1Hz <Interval>Positioning interval: |
| $PAIR062,<Type>,<OutputRate>*<Checksum> | Configure NMEA statement output type and output frequency | $PAIR062,0,3*3D | Set the output frequency of GGAT statement in NMEA output to once every 3 positions (refer to Quectel_LC26G&LC76G&LC86G_GNSS_Protocol_Specification_V1.0.0_Preliminary, 2.3.13) |
| $PAIR066,<GPS_Enabled>,<GLONASS_Enabled>,<Galileo_Enabled>,<BDS_Enabled>,<QZSS_Enabled>,0*<Checksum> | Configuring galaxies | $PAIR066,1,1,1,1,0,0*3A | Configuring galaxies as GPS+GLONASS+Galileo+BDS <*_Enabled>GNSS galaxies configuring |
| $PAIR004*<Checksum> | Hot starts | $PAIR004*3E | Hot starts |
| $PAIR005*<Checksum> | Warn starts | $PAIR005*3F | Warm starts |
| $PAIR006*<Checksum> | Cold starts | $PAIR006*3C | Cold starts |
| $PAIR007*<Checksum> | Clear system configuration and cold starts | $PAIR007*3D | Clear system configuration and cold starts |
Note: After changing the configuration content, you need to modify the checksum <Checksum> accordingly. For more details, you can refer to LC76G chip GNSS protocol.
Working with Windows
- Connect the GPS antenna and the USB to the UART module (not included), and then connect to the computer as the picture shows. After connecting, the power indicator light (PWR) is always on.
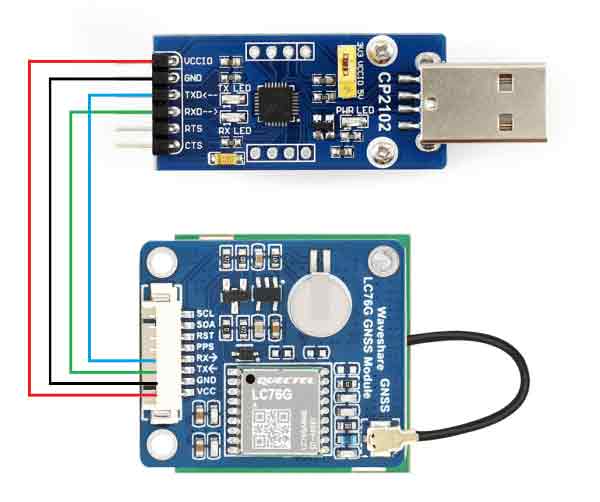
Note: the red cable is not VCC and the black cable is not GND.
| Module | USB to UART |
|---|---|
| VCC | 5V/3.3V |
| GND | GND |
| RX | TXD |
| TX | RXD |
| PPS | NC |
- Open the computer serial port debugging assistant, set the corresponding serial port number (com5 here), baud rate 9600, 8 data bits, 1 stop bit, no parity bit, and no flow control.
Sscom can be downloaded Here.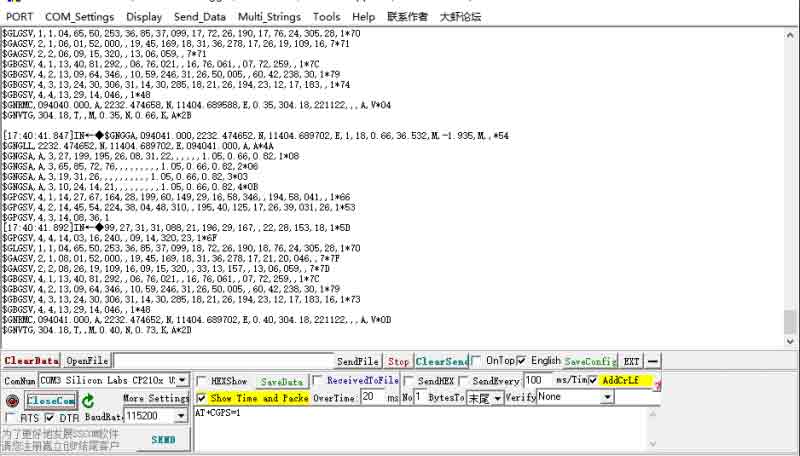
Note:
1. Due to the instability of GPS indoor search, please put the module or antenna next to the balcony or window, or conduct experiments directly outdoors.
2. The first positioning of the module (cold start), under normal circumstances (outdoors, good weather, no large building block), takes 35 seconds to successfully locate, please wait patiently. If the weather conditions are bad, it may take longer to locate, or even fail to locate.
Download U-center, unzip it, and open it for installation. Run the program, click the Receiver menu, select Port, and set the actual serial port number, Baudrate: 9600. Click (connect button) to connect to the GPS module, and the u-center will display various information, as shown below: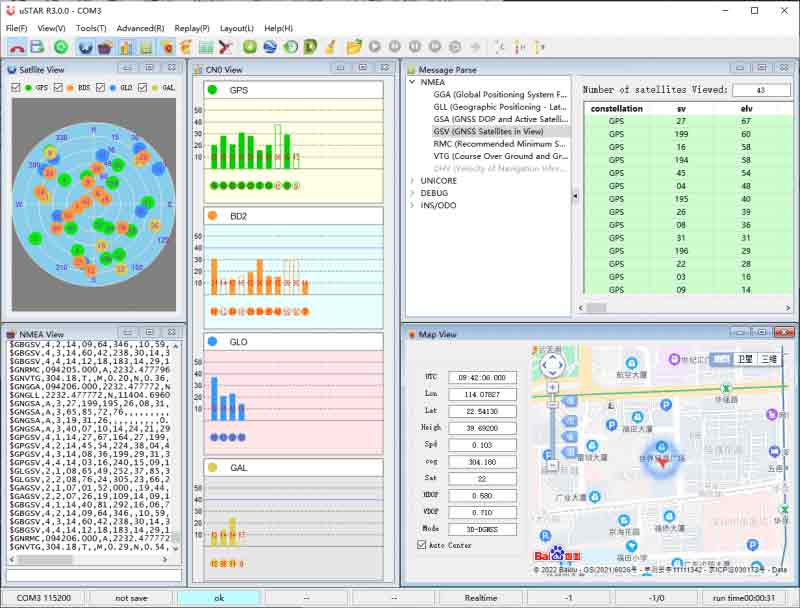
Working With Raspberry Pi
Provide C and Python demos for control in Raspberry Pi.
Enable UART Port (Skip if enabled)
Enable the Raspberry Pi terminal and input the following commands to enter the interface.
sudo raspi-config
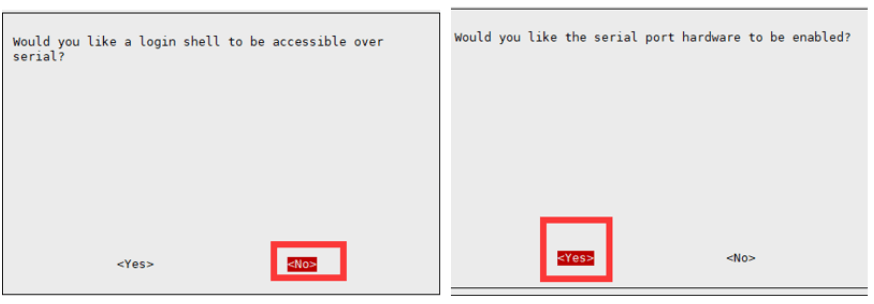
Choose Interfacing Options -> Serial, close the shell visit, and enable the serial port of the hardware: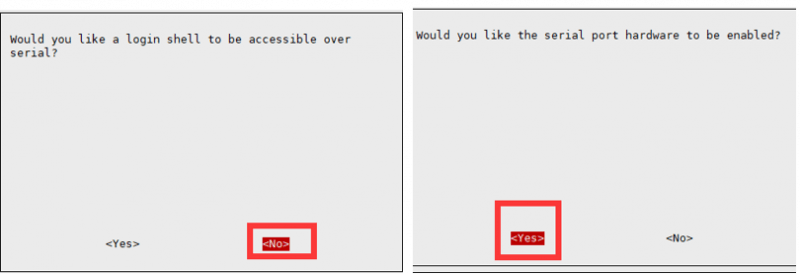
Hardware Connection
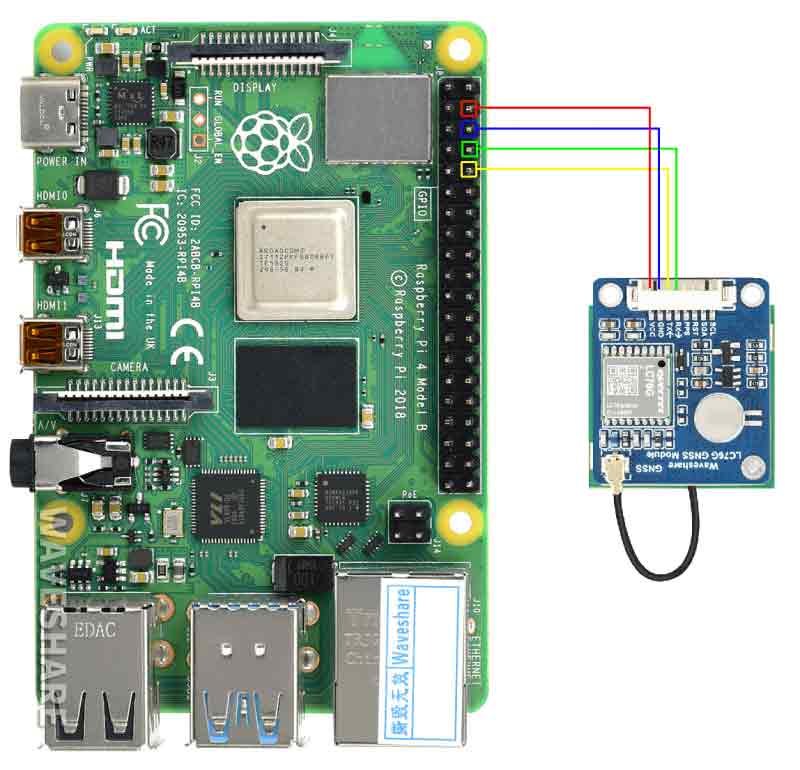
| Module | Raspberry Pi |
|---|---|
| VCC | 5V |
| GND | GND |
| TX | P15 |
| RX | P14 |
| PPS | NC |
Minicom Debug
Download and install minicom tool:
sudo apt-get install minicom
The corresponding serial port number for the position hardware serial port:
ls -l /dev/serial*
If the system has used the serial port and has been modified, there are two scenarios:
The default state after enabling the UART function:
The state after modifying the UART config.
Need to find the serial port number corresponding to serial0 (that is, the serial port on GPIO), as shown in Figure 1, the serial port number is ttyS0, and Figure 2 is ttyAMA0; use minicom to open the serial port:
sudo minicom -D /dev/ttyS0 -b 9600
-D stands for port. If the serial port number in the previous step is ttyAMA0, then it is:
sudo minicom -D /dev/ttyAMA0 -b 9600
The default baud rate of minicom is 115200, if you need to set the baud rate to 9600, add the parameter -b 9600.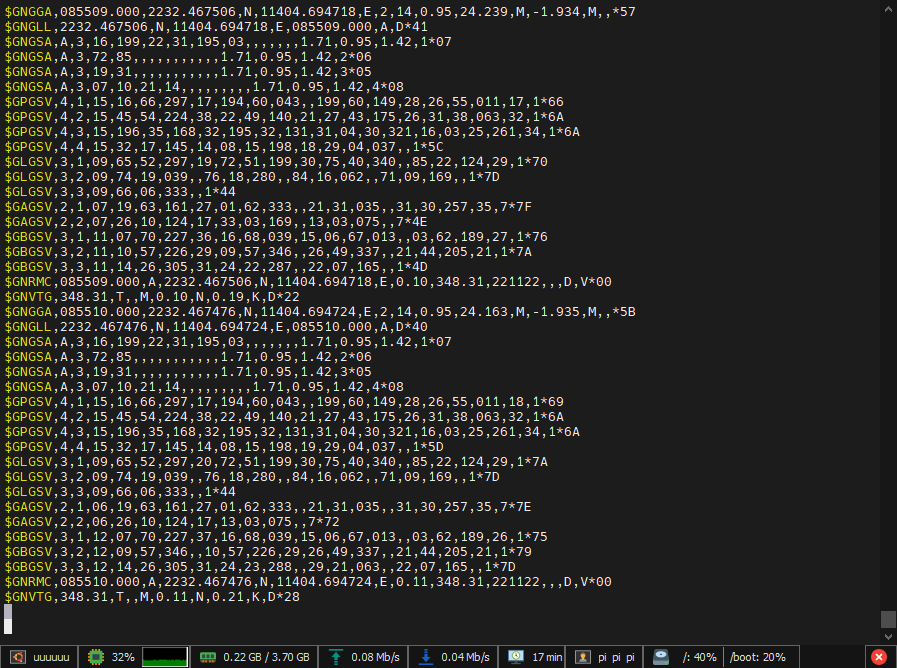
Exit: Ctrl+A then press X alone, YES to enter.
Download and Run the Test Demo
cd sudo apt-get install unzip -y sudo wget https://www.waveshare.com/w/upload/d/dc/LC76G_GPS_Module_code.zip sudo unzip LC76G_GPS_Module_code.zip -d ./LC76G_GPS_Module_code sudo chmod 777 -R ./LC76G_GPS_Module_code cd ./LC76G_GPS_Module_code
Or click here to download, and then unzip it to Raspberry Pi.
Environment Debugging
Install the related function library of the demo.
BCM2835
#Open the Raspberry Pi terminal and run the following commands: wget http://www.airspayce.com/mikem/bcm2835/bcm2835-1.71.tar.gz tar zxvf bcm2835-1.71.tar.gz cd bcm2835-1.71/ sudo ./configure && sudo make && sudo make check && sudo make install # For more details, you can refer to: http://www.airspayce.com/mikem/bcm2835/
WiringPi
Open he Raspberry Pi terminal and run the following commands:
cd sudo apt-get install wiringpi #For Raspberry Pi systems after May 2019 (earlier than that may be implemented without), an upgrade may be required to: wget https://project-downloads.drogon.net/wiringpi-latest.deb sudo dpkg -i wiringpi-latest.deb gpio -v # Run gpio -v and version 2.52 will appear, if it does not appear, it means there is an installation error
#The Bullseye branch system uses the following command: git clone https://github.com/WiringPi/WiringPi cd WiringPi ./build gpio -v # Run gpio -v and version 2.70 will appear, if it does not appear it means there is an installation error
Python
The latest Raspberry Pi system needs to install a GPS data analysis library for running Python.
cd L76K_GPS_Module_code/RaspberryPi/python3/micropyGPS-master sudo python setup.py install #Wait for library installation
If the old system only supports Python2, it requires the function library.
sudo apt-get update sudo pip install RPi.GPIO sudo apt-get install python-serial
C Demo
cd C make clean make sudo ./main
Baudu Coordinates is the coordinates converted from the Baidu map coordinates. Copy the coordinates to http://www.gpsspg.com/maps.htm, choose the Baidu map on the left side, and then you can see your location. (if you go directly to "Baidu Pickup Coordinate System" you need Swap the positions of the two latitude and longitude numbers). 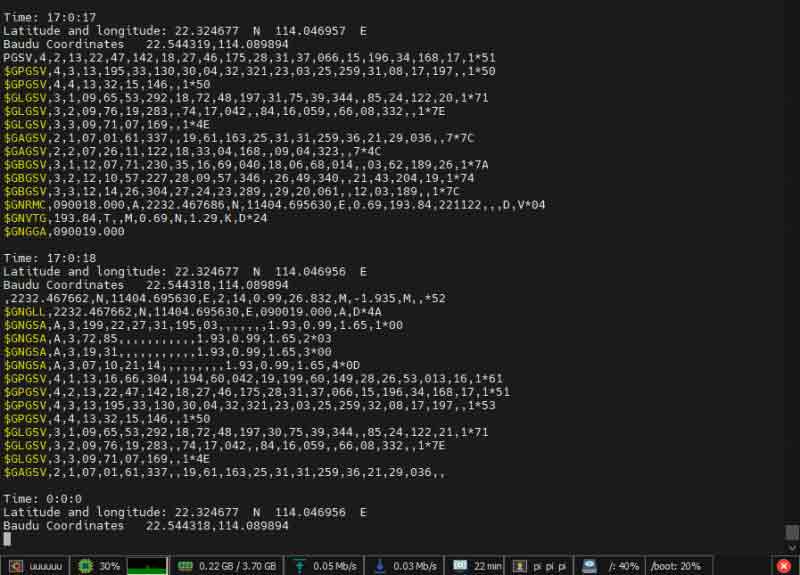
Python 3 Demo
cd python sudo python main.py
Expected Result
It takes about 35 seconds for the module to be positioned for the first time.
The front is the raw data output by the module.
"Time" is the time output by L76X GPS Module.
Latitude and longitude are the output latitude and longitude and latitude and longitude direction.
Baidu Coordinates is the converted Baidu nao coordinates, copy the coordinates to http://www.gpsspg.com/maps.htm, select Baidu map on the left, and you can see your location (if you go directly to "Baidu Pickup Coordinate System" you need to "Swap" the positions of the two latitude and longitude numbers).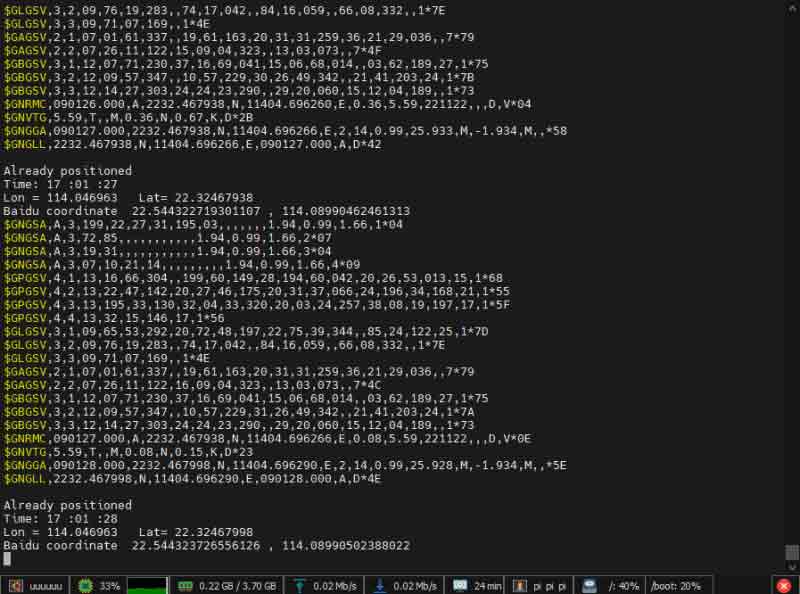
Python 2 Demo
cd python sudo python main.py
Expected Result
It takes 35 seconds for the module to be positioned for the first time.
The front is the raw data output by the module.
Time is the time output by L76X GPS Module.
Latitude and longitude are the output latitude and longitude and the directions of latitude and longitude.
Baidu Coordinates is the converted Baidu map coordinates, copy the coordinates to http://www.gpsspg.com/maps.htm, select Baidu map on the left, and you can see your location (if you go directly to "Baidu Pickup Coordinate System" you need Swap the positions of the two latitude and longitude numbers).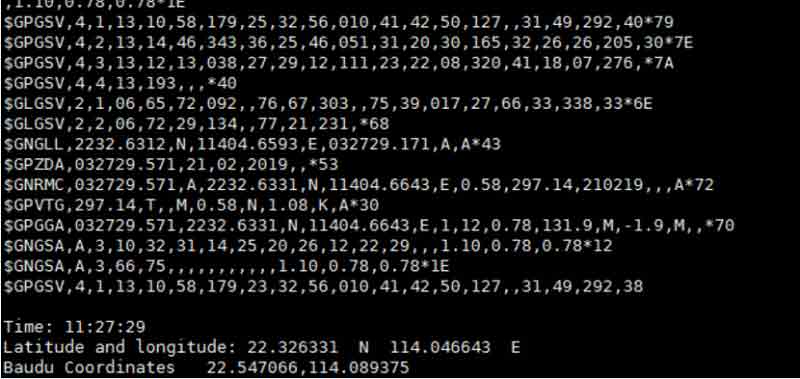
I2C Interface Usage
Hardware Connection
| Module | RaspberryPi |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | SDA |
| SCL | SCL |
| RST | 4 (BCM code) |
Demo Test
First of all, you need to make sure that the Raspberry Pi system has installed the GPS data parsing library, if not, refer to the above environment configuration for installation, this demo only supports python3. Enter the directory where the program is located, and run the program.
cd lc76g_i2c sudo python3 lc76g_i2c.py
When the demo is run, the following effect is displayed: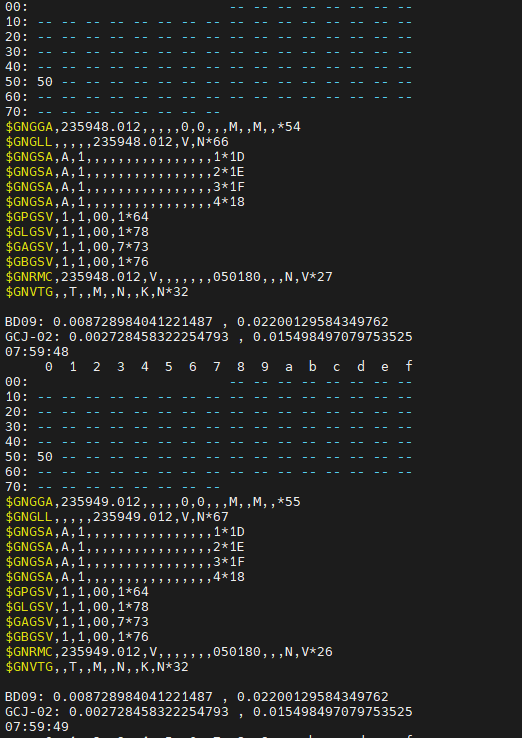
After positioning: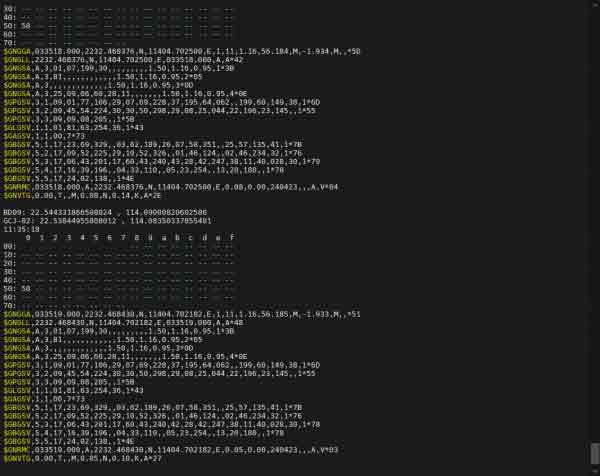
The above shows the I2C address of the module, the raw NMEA statements read and the processed data.
Since the serial port can meet most of the usage requirements and the I2C mode of lc76g has high requirements for logic timing, which requires users to have some understanding of Raspberry Pi programming, it is recommended to give priority to serial communication.
Working with Arduino
This demo has been verified on Arduino MEGA2560.
Click to download the sample demo or download it in the #Resource.
Hardware Connection
| Module | Arduino |
|---|---|
| VCC | 5V |
| GND | GND |
| TX | RX2 |
| RX | TX2 |
| PPS | NC |
Demo Use
Choose the Arduino mega2560 development board and the corresponding port, and upload the demo after verification.
The first position for the module will take 35 seconds.
Open SSCOM and set the baud rate as 9600.
The original data is output by the module at first.
Time is the time of L76X GPS Module output.
Lat and Lon are the output latitude and longitude and latitude and longitude directions. B_Lat and B_Lon are the converted Baidu map coordinates, copy the coordinates to http://api.map.baidu.com/lbsapi/getpoint/, and you can see your location (the coordinate format is longitude Lat first, latitude Lon after, separated by commas in the middle).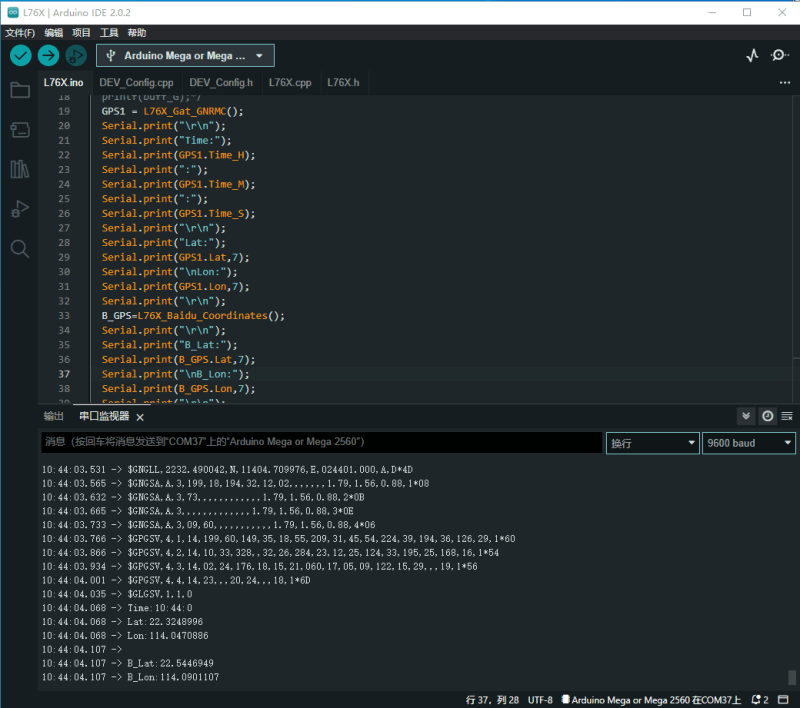
The file also comes with the Arduino uno demo, but the platform data accuracy is not enough, only to achieve the display of satellite data in time, want to other information can modify their own procedures.
Working with Raspberry Pi Pico
Hardware Connection
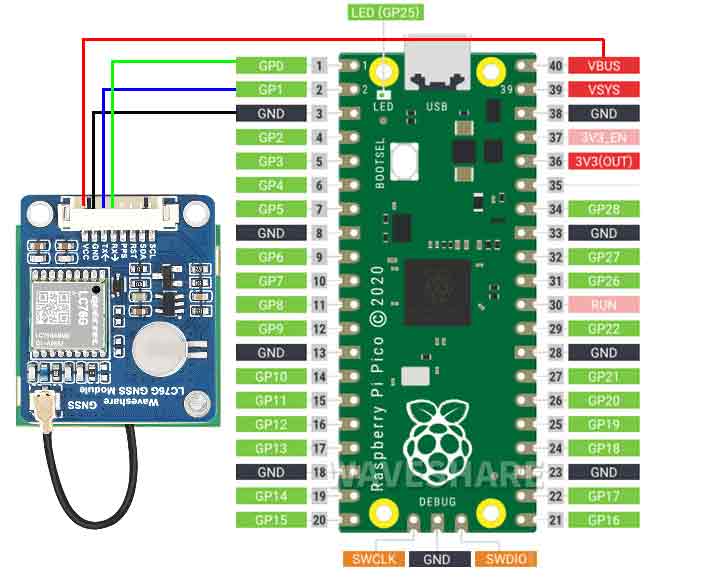
| Module | Raspberry Pi Pico |
|---|---|
| VCC | 5V |
| GND | GND |
| TX | GP1 |
| RX | GP0 |
| PPS | NC |
Environment Building
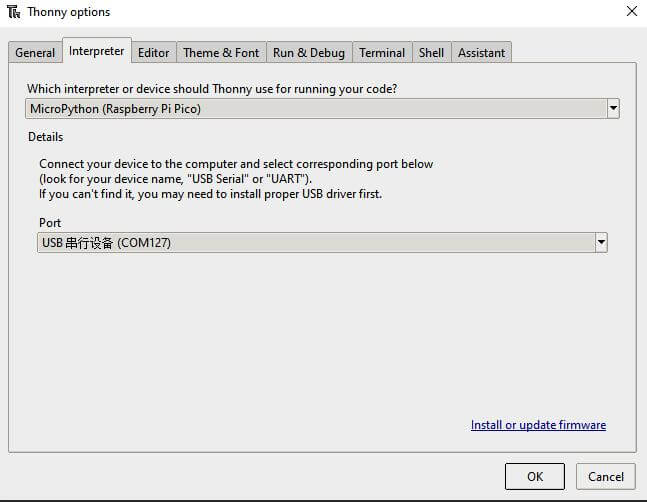
We test the demo with Thonny in this tutorial, click to download the related IDE and open Thonny.
- Please refer to the official document to set up the Python environment. Choose a Raspberry Pi Pico device in Tools->Options->Interprete. As shown below:
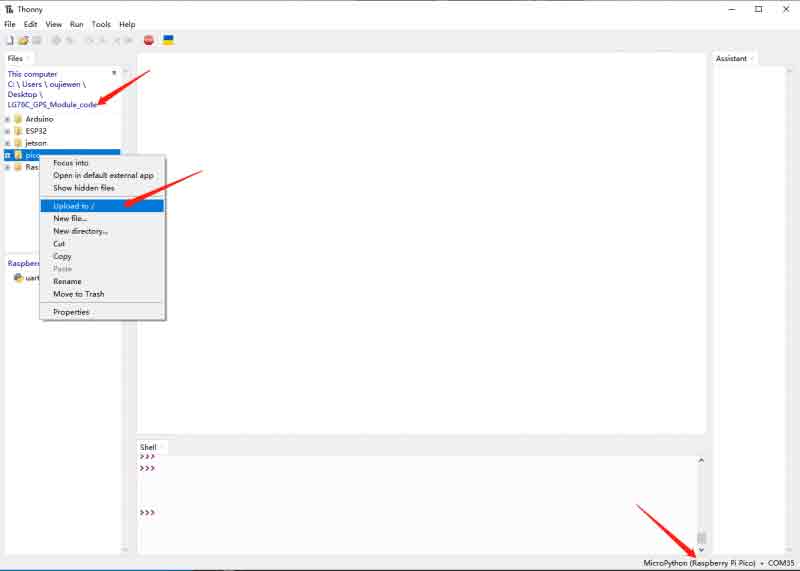
Download Demo
- Click to download demo.
- Unzip the sample demo;
- Open Thonny, first confirm that you have connected to Pico, then open the unzipped program path in the upper left corner, right-click on the Pico folder, and select Upload, as shown in the picture.
Demo Usage
1. Open Thonny IDE, choose the Pico directory, double-click to open the coordinate_convert.py file and run the demo, as shown below: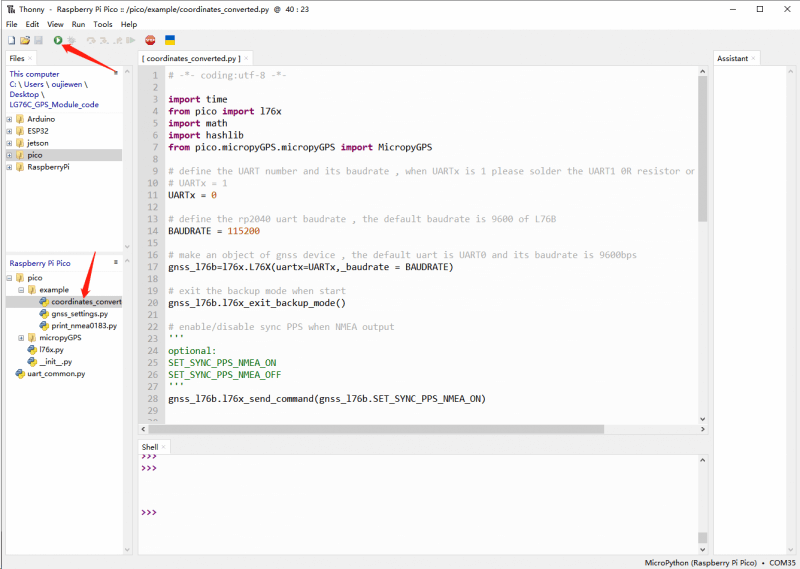
2. Under clear weather conditions, the LC76G will get the position about 30 seconds after powering up, as shown in the following figure when running the program: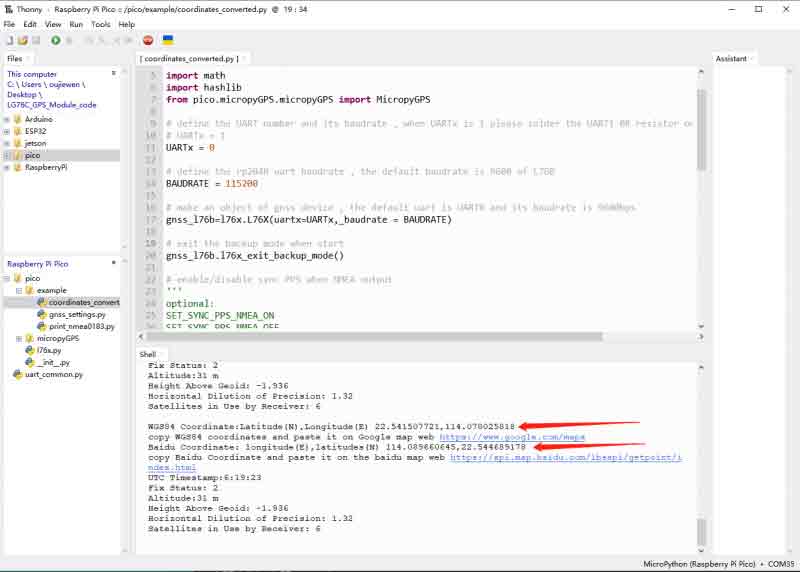
3. Users can copy the location information displayed in the terminal of Thonny and use Google Map and Baidu Map to mark the coordinates.
ESP32
Hardware Connection
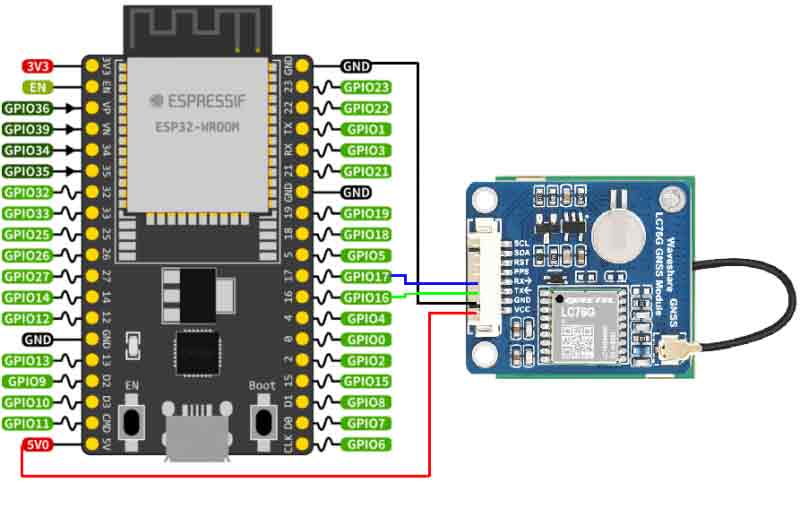
| Module | ESP32 |
|---|---|
| VCC | 5V |
| GND | GND |
| TX | P16 |
| RX | P17 |
| PPS | NC |
Environment Building
Install ESP32 plug-in On Arduino IDE
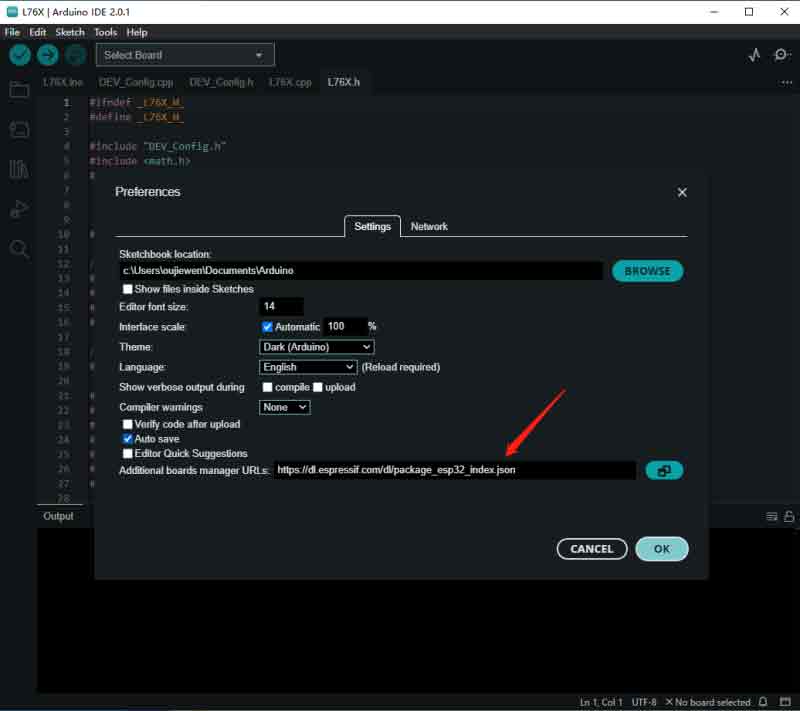
1. Open the Arduino IDE, click on the file in the upper left corner, and select Preferences.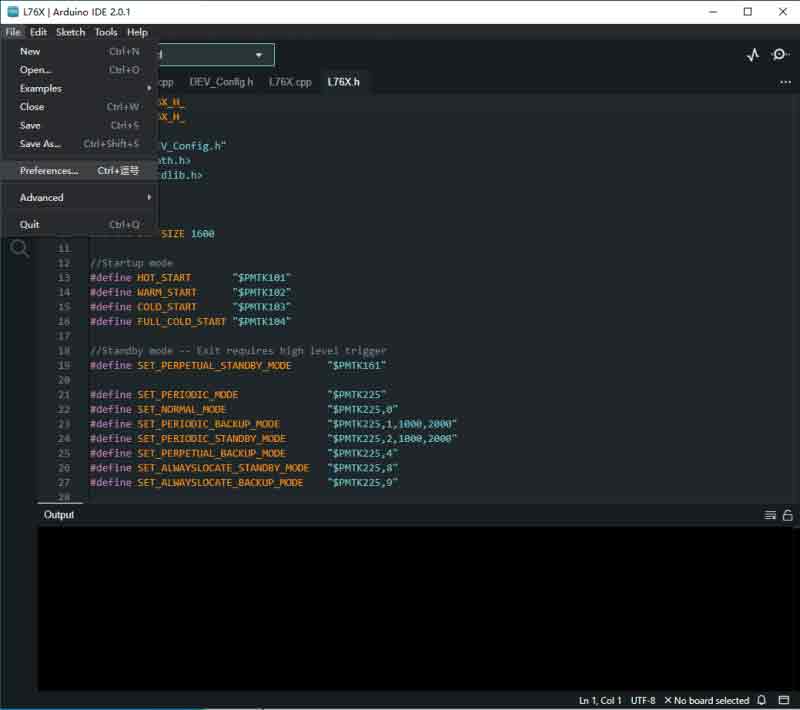
2. Add the following link in the additional development board manager URL, then click OK.
https://dl.espressif.com/dl/package_esp32_index.json
Note: If you already have the ESP8266 board URL, you can separate the URLs with commas like this:
https://dl.espressif.com/dl/package_esp32_index.json,http://arduino.esp8266.com/stable/package_esp8266com_index.json
3. Download the package and copy the packages file to the following path:
C:\Users\xutong\AppData\Local\Arduino15

Note: Replace the username: xutong with your own username.
How To Use the Demo
- Download the demo and unzip it, and use the configured Arduino IDE to open the L76X.ino file in the ESP32 directory, and wait for all the files to be loaded.
- Use the data cable to connect the esp32 development board to the computer, and select the correct development board model and port number.
- Here we take the ESP32-S chip development board as an example: click in turn: Tools -> Development Board -> esp32 -> ESP32 Dev Module, and select the corresponding port number.
- Click "Verify" in the upper left corner, wait for the verification to complete without error, and then click "Upload".
- After the upload is complete, the demo runs automatically. Click Tools -> Serial Monitor in turn, and you can observe the running effect of the demo in the serial monitor window:
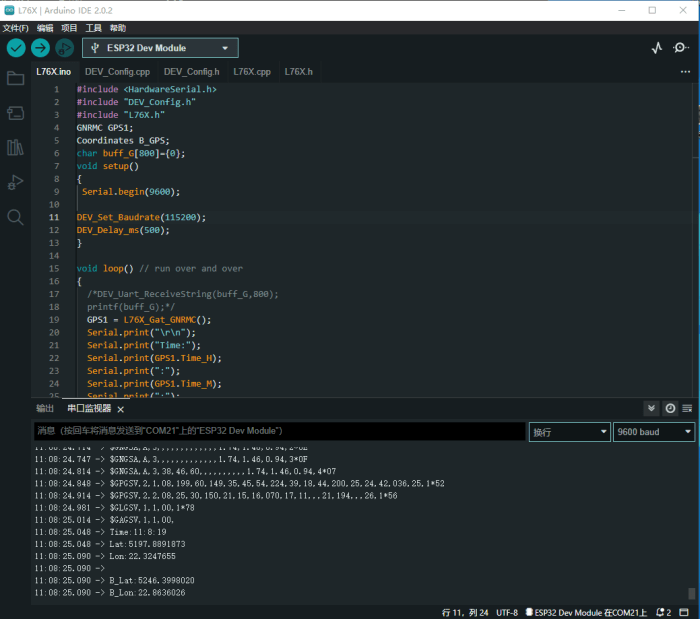
It takes 35 seconds for the module to be positioned for the first time. (It may be longer if the signal condition is not good). The front is the raw data output by the module. Time is the time output by L76X GPS Module. "Lat" and "Lon" are the output latitude and longitude and the directions of latitude and longitude.
B_Lat and B_Lon are the converted Baidu map coordinates, copy the coordinates to http://api.map.baidu.com/lbsapi/getpoint/, and you can see your location (the coordinate format is longitude Lat first, latitude Lon after, separated by commas in the middle).
Working with Jetson Nano
This demo has been burned in the Jetson Nano Dev Kit and verified.
Hardware Connection
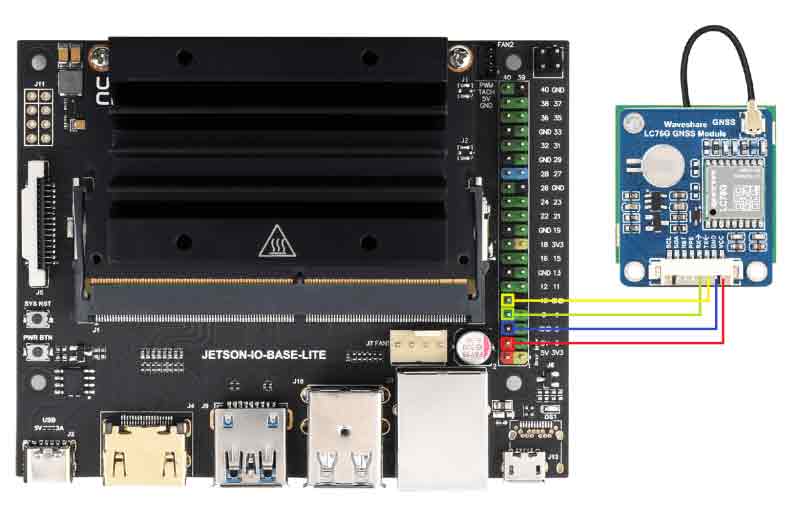
| Module | JETSON-NANO-DEV-KIT |
|---|---|
| VCC | 5V |
| GND | GND |
| TX | 10 |
| RX | 8 |
| PPS | NC |
Environment Debugging
Install pip Tool
Use apt-get tool to install python tool pip:
sudo apt-get install python3-pip #python3 #After that, you need to enter the user password to verify
sudo apt-get install python2-pip #python2 #After that, you need to enter the user password to verify
Wait for the installation.
Install Python Library
#Libraries required for python3 programs: sudo pip3 install pyserial #Serial Control Library sudo pip3 install settools #Install tools cd jetson/python3/micropyGPS-master sudo python3 setup.py install #Data Analysis Library
Libraries needed for #python2 programs: sudo pip install pyserial #serial port control library
Demo Use
Enter the directory and run main.py:
cd jetson/python3 sudo python3 main.py
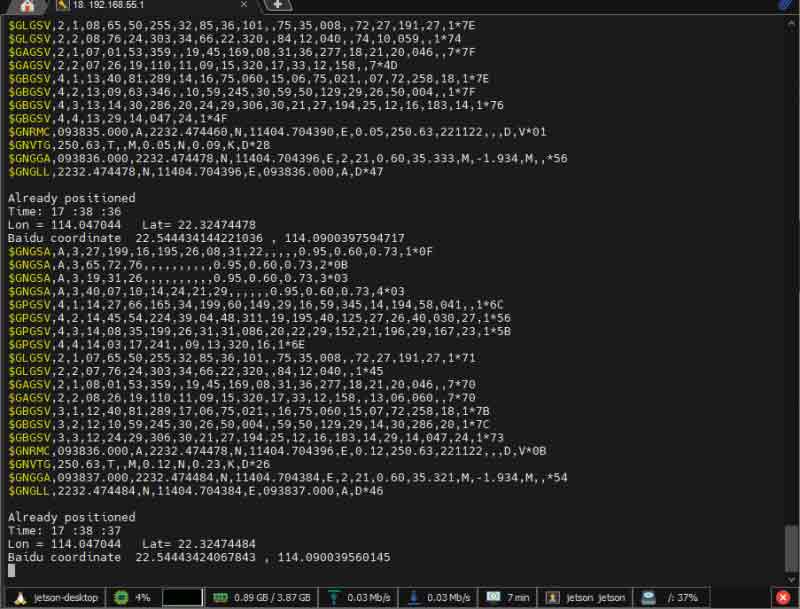
- It takes 35 seconds for the module to be positioned for the first time.
- The front is the raw data output by the module.
- Time is the time output by L76X GPS Module.
- Latitude and longitude are the output latitude and longitude and the direction of latitude and longitude.
- Baidu Coordinates is the converted Baidu map coordinates, copy the coordinates to http://www.gpsspg.com/maps.htm, select Baidu map on the left, and you can see your location (if you go directly to "Baidu Pickup Coordinate System" you need Swap the positions of the two latitude and longitude numbers).
Resource
Document
Demo
Software
Datasheet
FAQ
Question:Why is the positioning wrong?
The positioning accuracy IS RELATED TO the environment where it is located, one is the rainy weather with more moisture in the air, which affects the transmission of the signal. This is also the reason why the cell phone signal is slightly weaker in summer. Summer rain is more humid, coupled with high-temperature evaporation, which makes more moisture in the air, thus affecting the transmission of satellite signals.
The second factor is in some high-rise buildings next to the satellite signal are easy to cause bad or signal offset problems, in the building of low-level or underground buildings, such as underground parking, underground shopping malls, subways, tunnels, etc., due to the wall blocking, indoor signal attenuation is very large, the formation of a signal coverage weakness, so the positioning is not accurate, error, etc., the same in some high mountain blocking is also easy to cause positioning imprecise.
Thirdly, the number of satellites in rural and remote areas is small, resulting in large deviations in position. Fourth, the satellite signal will be affected by the atmospheric ionosphere, ground buildings, forests, water, and other factors, resulting in deviations in the calculation.
Question: I'm still not receiving data outdoors?
Question: Why does it not match with the cell phone positioning?
Question: Why does the module baud rate remain unchanged when the modified baud rate command is sent?
Question: Why did I configure it and revert to the initial state on the second boot?
Question: How to parse the obtained location information?
Question:Why does running the sample program not print the location information, nor does opening the minicom?
Enable UART Port
Open the Raspberry Pi terminal and enter the following command to access the configuration screen:
sudo raspi-config
Select Interfacing Options -> Serial to disable shell access and open the hardware serial port: