- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025


Raspberry Pi NEO M8T GNSS TIMING HAT, Beidou, Galileo, GLONASS
$79.89
This is a Raspberry Pi GNSS HAT based on NEO-M8T with multi-constellation receiver support, as well as precise single-satellite timing feature. It supports concurrent reception of up to 3 GNSS (GPS, Beidou, Galileo, GLONASS) and augment systems like SBAS, QZSS, IMES, and D-GPS. It features accurate & fast positioning with minor drifting, low power consumption, outstanding ability for anti-spoofing & anti-jamming, and so on.
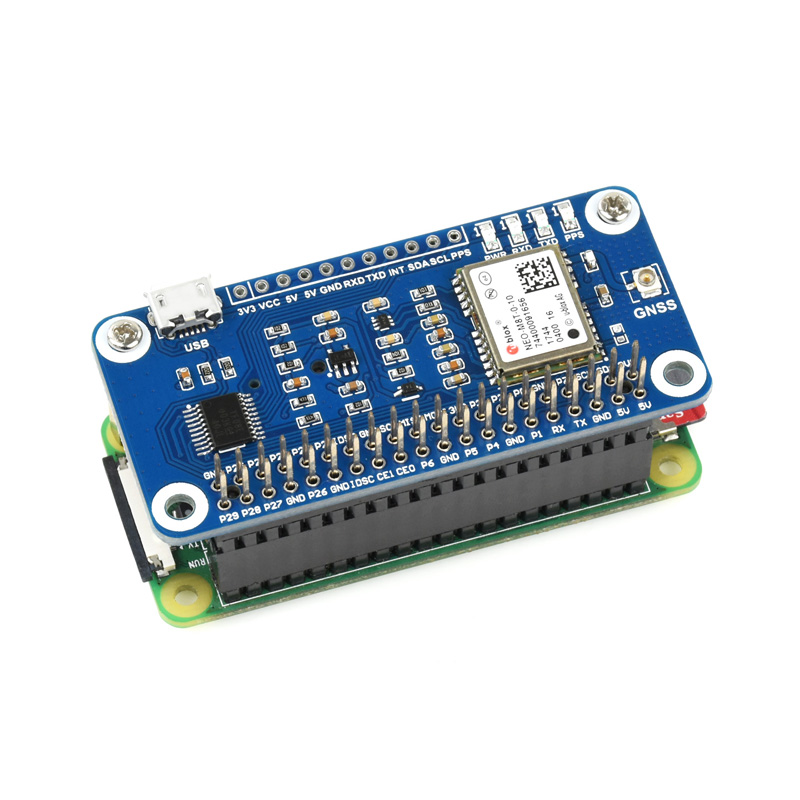
By simply attaching it onto the Pi, it is fairly easy to enable GNSS capability for your Raspberry Pi.
GNSS Module Based On NEO-M8T For Raspberry Pi, Single-Satellite Timing Feature
Accurate & Fast Positioning With Minor Drifting, Low Power Consumption, Outstanding Ability For Anti-Spoofing & Anti-Jamming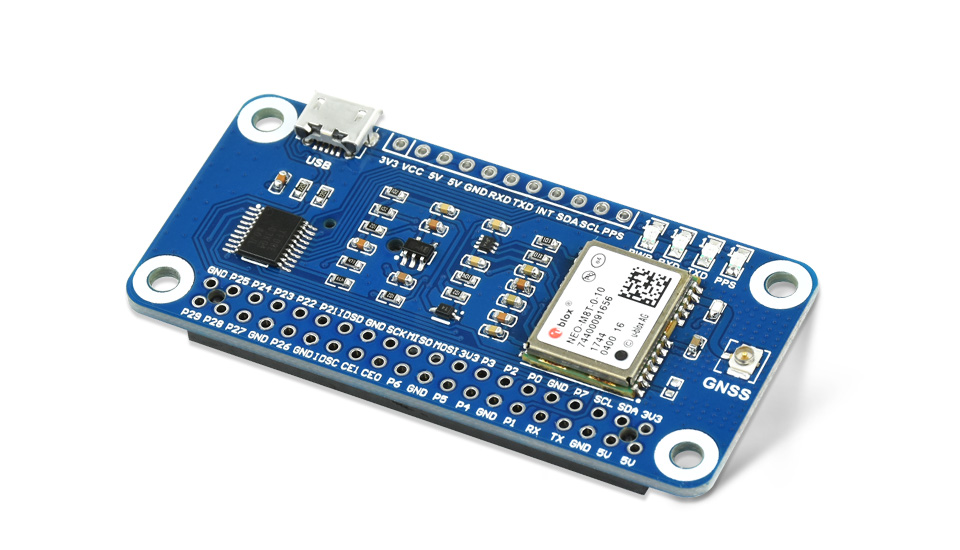
This is a Raspberry Pi GNSS HAT based on NEO-M8T with multi-constellation receiver support, as well as precise single-satellite timing feature. It supports concurrent reception of up to 3 GNSS (GPS, Beidou, Galileo, GLONASS) and augment systems like SBAS, QZSS, IMES, and D-GPS. It features accurate & fast positioning with minor drifting, low power consumption, outstanding ability for anti-spoofing & anti-jamming, and so on.
By simply attaching it onto the Pi, it is fairly easy to enable GNSS capability for your Raspberry Pi.
- Precise timing feature, high availability even with one single satellite
- High dynamic range radios with both analog and digital interference mitigation, supporting applications in wireless communications equipment
- Multi-constellation receiver support, concurrent reception of up to 3 types of GNSS satellite systems from GPS, Beidou, Galileo, and GLONASS, and still retains low power consumption
- Augment systems support, including SBAS, QZSS, IMES, D-GPS, improving the positioning performance of service location
- A-GNSS (Assisted GNSS) support, reducing the first positioning time when powered up, improving the acquisition sensitivity
- Features -167dBm navigating sensitivity and outstanding ability for anti-spoofing & anti-jamming, supports geo-fencing
- Supports U-Center, an easy way to config the module
- Standard Raspberry Pi 40PIN GPIO extension header, supports Raspberry Pi series boards, Jetson Nano
- Breakouts the module's UART and I2C interface, for connecting with host boards like Arduino/STM32
- Baudrate range: 4800~921600bps (9600bps by default)
- Supports DDC (I2C compliant) interface: up to 400KHz (max)
- Onboard battery holder, supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts
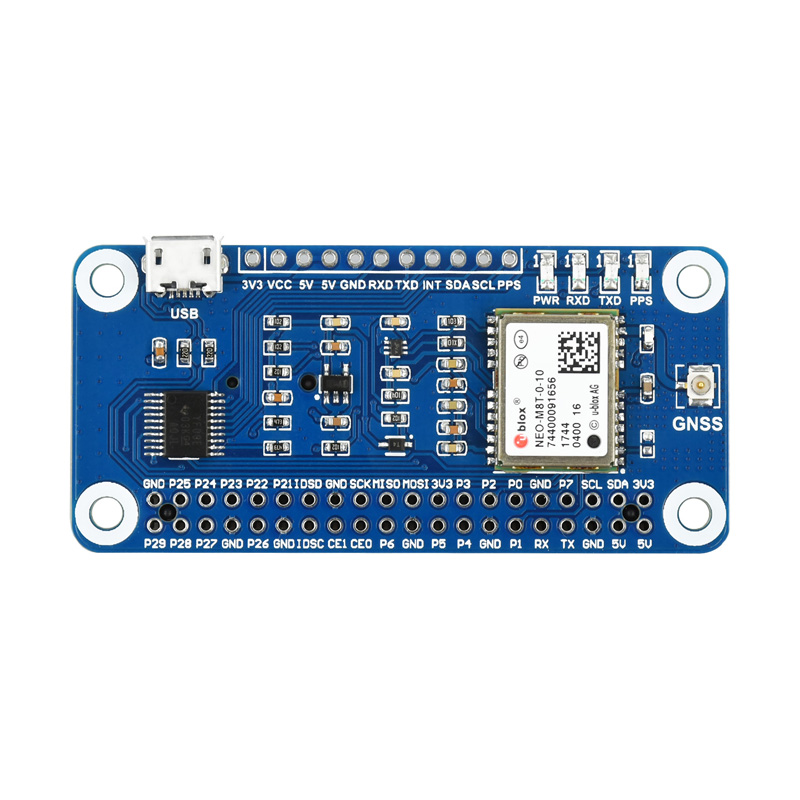
- 4x LEDs for indicating the module operating status
- Comes with development resources and manual (examples for Raspberry Pi/Jetson Nano/Arduino/STM32)
| GNSS SPECIFICATIONS | ||||||
|---|---|---|---|---|---|---|
| NEO-M8T | GPS & GLONASS | GPS | GLONASS | BeiDou | Galileo | |
| Frequency band | 72-channel u-blox M8 engine GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1, Galileo E1B/C | |||||
| Horizontal positioning accuracy | Autonomous | 2.5m CEP | 2.5m CEP | 4.0m CEP | 3.0m CEP | - |
| SBAS | 2.0m CEP | 2.0m CEP | - | - | - | |
| Max navigation update rate | 4Hz | 10Hz | 10Hz | 10Hz | 10Hz | |
| Time-To-First-Fix | Cold starts | 25s | 29s | 30s | 34s | 45s |
| Hot starts | 1s | 1s | 1s | 1s | 1s | |
| Aided starts | 2s | 2s | 2s | 3s | 7s | |
| Sensitivity | Tracking and navigating | -167 dBm | -166 dBm | -166 dBm | -159 dBm | -159 dBm |
| Aided acquisition | -157 dBm | -157 dBm | -151 dBm | -146 dBm | -142 dBm | |
| Re-acquisition | -160 dBm | -160 dBm | -156 dBm | -156 dBm | -153 dBm | |
| Cold starts | -148 dBm | -148 dBm | -145 dBm | -143 dBm | -138 dBm | |
| Hot starts | -160 dBm | -160 dBm | -156 dBm | -155 dBm | -151 dBm | |
| Velocity accuracy | 0.05 m/s | 0.05 m/s | 0.1 m/s | 0.1 m/s | 0.1 m/s | |
| Heading accuracy | 0.3 degree | 0.3 degree | 0.4 degree | 0.5 degree | 0.5 degree | |
| PPS accuracy | Clear sky | ≤20ns | ||||
| Indoor | ≤500ns | |||||
| Jitter | ±11ns | |||||
| PPS frequency | 0.25Hz…10MHz (configurable) | |||||
| Operational limits | Acceleration (max): 4g | |||||
| Altitude (max): 50000m | ||||||
| Velocity (max): 500m/s | ||||||
| OTHER SPECIFICATIONS | ||||||
| Communication interface | USB, UART (4800~921600bps, 9600bps by default), I2C (max 400KHz) | |||||
| Update rate | 1Hz (default), 10Hz (max) | |||||
| Protocol | NMEA 0183 Version 4.0 (V2.3 or V4.1 selectable), UBX, RTCM 2.3 | |||||
| Power supply | 5V | |||||
| Overall current | <45mA@5V (Continue mode) | |||||
| Module current | 32mA@3V (Continue mode) | |||||
| Operating temperature | -40℃ ~ 85℃ | |||||
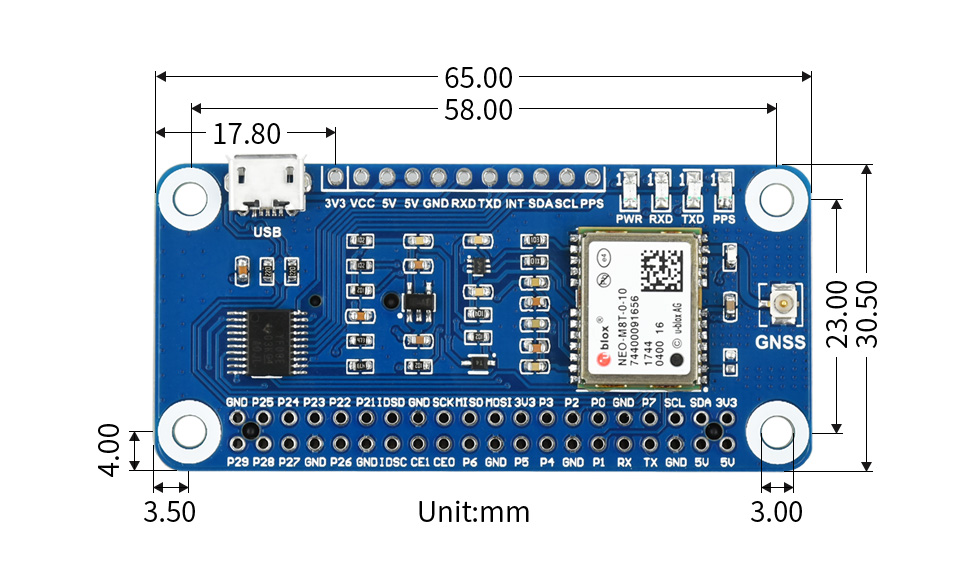
| Dimensions | 65mm × 30.5mm | |||||
Compatible With Raspberry Pi Series Boards, Jetson Nano
High Integrity, Precise Timing Feature, High Availability Even With One Single Satellite
Cost Effective, High Precision, Easy Implement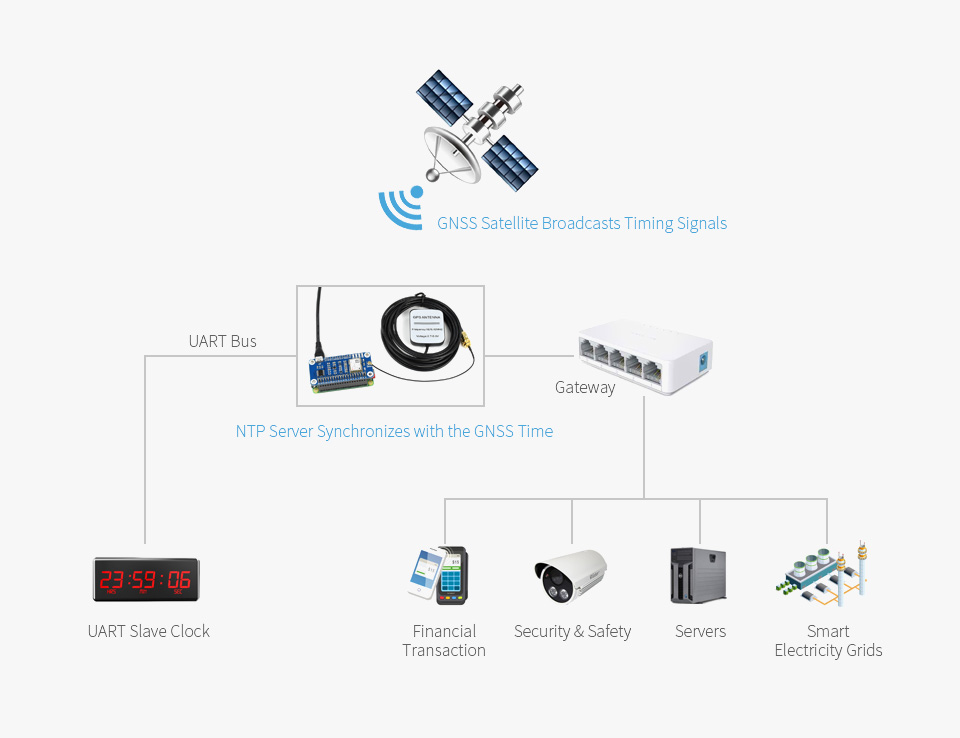
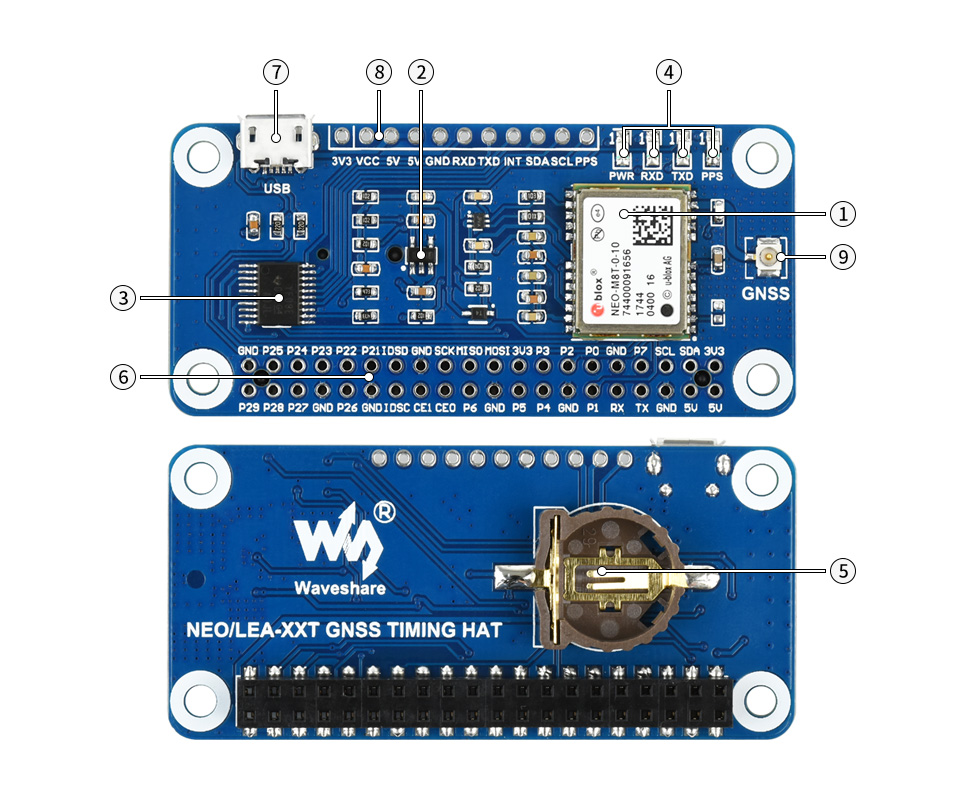
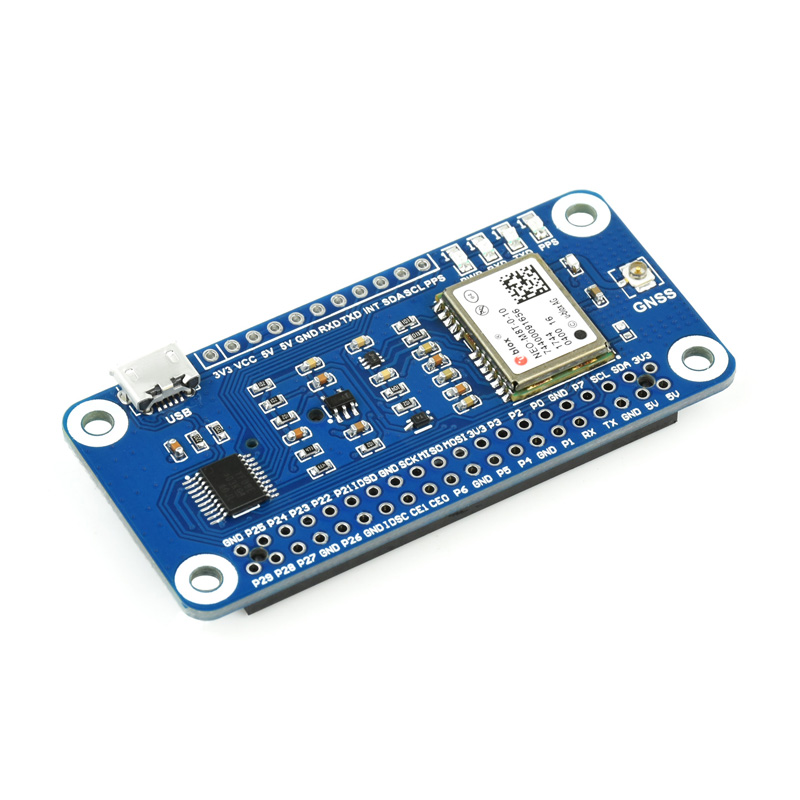
- NEO-M8T module
- RT9193-33 power chip
- TXS0108EPWR voltage translator
- Status indicators
RXD/TXD: UART TX/RX indicator
PPS: GPS status indicator
PWR: power indicator - Battery holder
supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts
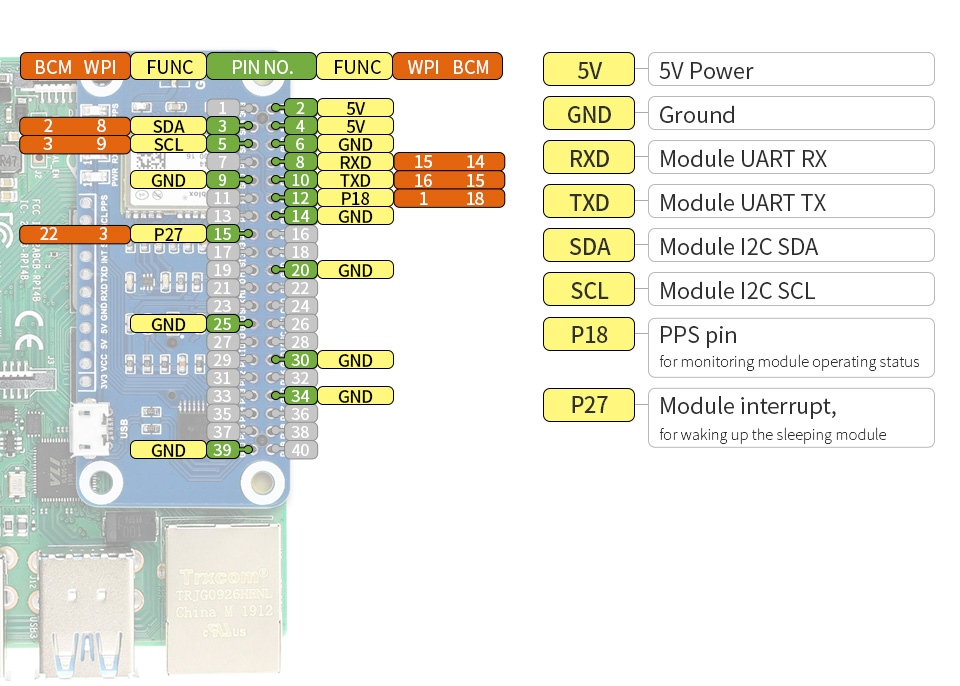
- Raspberry Pi GPIO header
for connecting with Raspberry Pi - USB port
- UART, I2C interface
for connecting with other MCUs - GNSS antenna connector