



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
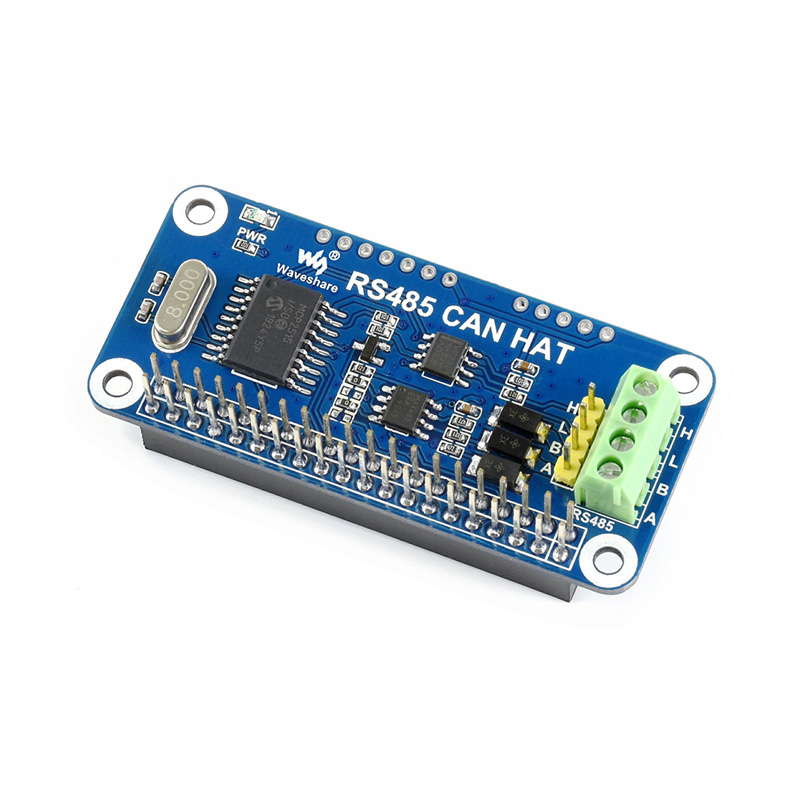
Raspberry Pi RS485 CAN HAT User Guide
Introduction
The RS485 CAN HAT will enables your Pi to communicate with other devices stably in long-distance via RS485/CAN functions.
Note:
There are two versions. The only difference betweem these version are the crystal. The old one use 8M and the line added to config.txt file should be:
dtoverlay=mcp2515-can0,oscillator=8000000,interrupt=25,spimaxfrequency=1000000
The new one use 12M crystal and the line should be
dtoverlay=mcp2515-can0,oscillator=12000000,interrupt=25,spimaxfrequency=2000000
TAG:
Raspberry Pi IR Thermal Imagi
MP2.5G Raspberry Pi 5 PCIe to 2.5G Ethernet HAT Pi5 RTL8125
Raspberry Pi 0.96inch LCD
Raspberry Pi Pico 2 RP2350B 4.3inch Capacitive TouchScreen 4.3 inch LCD Display Development Board 800×480
Third-party library configuration
RS232 to Ethernet
Raspberry Pi 5
Milk-V Duo S 512MB SG2000 RISC-V
ESP32 C3
SpotPear
Wiki
Industrial Modbus RTU 8 ch Relay Module
Raspberry Pi CM5 Mini Base IO Board NANO B Development For Compute Module 5
Raspberry Pi 5 POE + PCIe to M.2 NVMe SSD Board HAT+ Pi5 2242/2230 Power over Ethernet
Raspberry Pi 8inch LCD 768x1024 Capacitive TouchScreen HDMI Display
5inch
Raspberry Pi PICO
ESP32 Google Dinosaur game
SP3232EEN
ESP32 S3 3.5 inch LCD Development Board 480x320 Display Capacitive TouchScreen Tablet /MP3 Video /Weather Clock LVGL For Arduino
TAG:
ESP32-S3 1.28inch Round LCD
SpotPear
White
Raspberry Pi Zero 4G CAT1 LTE USB HUB Air780e Expansion Board Networking Module LTE Ethernet
ESP32-S3 7inch LCD Display 7 inch TouchScreen 7B 1024×600 N16R8 CAN RS485 Sensor
ESP32
ESP32-P4-WIFI6-POE-ETH ESP32-C6 MIPI DSI 10.1 inch Display/CSI Camera/Audio Speaker For AI Deepseek
10.1 inch LCD DSI MIPI TouchScreen Display 1280x800 ESP32 P4 Luckfox Titan RK3576 Lyra RK3506
Raspberry Pi 500+ plus Personal computer Mechanical Keyboard With official SSD and Programmable RGB
Raspberry Pi 5 PD Power
ESP32-S3 AI Camera 1.28inch LCD Dual MIC Development Board Display 1.28 inch Voice Interruption Object Recognition 10-in-1 Multifunctional
Raspberry Pi Pico 2 RP2350 1.8 inch AMOLED Development Board Display 368×448 TouchScreen Programmable Watch QSPI
1.28 inch Round Rotary LCD Smart Screen 1.28inch Knob Display 240x240 Option Touch/No-Touch
Raspberry Pi Transparent Screen
Raspber Pi 5 5V5A Power
DeepSeek ESP32-S3 Voice Chat Robot
RV1103
PC USB Monitor Screen
Raspberry Pi USB Camera 12MP IMX378 30fps onboard dual microphones Also For Jeston / RDK
Raspberry Pi 5